











-
Passive sonar limits the ability to sample vertical scale spatiotemporally, and the received signal is indistinct by noise, resulting in the performance degradation or even failure of the source depth estimation method in deep ocean bottom bounce area. When vertical line array is arranged near the sea surface to locate the source by matched-field processing in bottom bounce area, there is great ambiguity in depth dimension. In this work, the problem of source depth estimation in bottom bounce area is addressed. The peak stripe of angle-range interference pattern is modeled and analyzed based on the ray theory, and a source depth estimation method is proposed, which comprises two parts: estimating sound source depth by utilizing peak stripe fluctuation characteristic combined with spatial spectrum analysis, and reconstructing interference pattern using principal component analysis. The flowchart of the method is listed as follows. Firstly, the spatial spectrum corresponding to each range is spliced to obtain the original angle-range interference pattern. Secondly, the original interference pattern is denoised by principal component analysis to obtain the reconstructed interference structure. Finally, the fluctuation period of peak fringes is extracted from the reconstructed interference pattern to calculate the source depth. Under the low signal-to-noise ratio (SNR) condition, the peak stripe destroyed by noise will reappear in the reconstructed interference pattern and the estimation result of sound source depth will be more accurate, making the source depth estimation method suitable for bottom bounce area. The method combines the space-time cumulative gain of the array and the low-rank characteristic of the interference pattern. The simulation results obtained by Bellhop indicate that the fluctuation period of peak stripe depends on the depth and frequency of the source, which is consistent with the modeling result, and the source depth can be estimated precisely by spatial Fourier transform. The simulation results also show that the rank of the interference pattern is very low and the peak stripe can be composed of a few principal components. Monte Carlo experimental results indicate that the estimated results of the source depth by using reconstructed interference pattern are more accurate than those without using principal component analysis at low SNR condition. The proposed method can achieve more than 80% accuracy at –3 dB SNR.
-
Keywords:
- bottom bounce area /
- angle-range interference pattern /
- source depth estimation /
- low signal-to-noise ratio
[1] Hinich M J 1979 J. Acoust. Soc. Am. 66 480
 Google Scholar
Google Scholar
[2] Debever C, Kuperman W A 2007 J. Acoust. Soc. Am. 122 1979
Google Scholar
[3] Yang T C 1979 J. Acoust. Soc. Am. 82 1736
[4] Yang T C 2014 J. Acoust. Soc. Am. 135 1218
Google Scholar
[5] Wang W B, Ni H Y, Su L, et al. 2019 J. Acoust. Soc. Am. 146 EL317
Google Scholar
[6] Liu Y N, Niu H Q, Li Z L 2020 J. Acoust. Soc. Am. 148 873
Google Scholar
[7] Neilsen T B, Escobar-Amado C D, Acree M C, et al. 2021 J. Acoust. Soc. Am. 149 692
Google Scholar
[8] Liu Y N, Niu H Q, Li Z L, et al. 2021 JASA Express Lett. 1 036002
Google Scholar
[9] Duan R, Yang K D, Ma Y L, et al. 2012 Chin. Phys. B 21 124301
Google Scholar
[10] Duan R, Yang K D, Li H, et al. 2019 J. Acoust. Soc. Am. 145 903
Google Scholar
[11] Mccargar R, Zurk L M 2013 J. Acoust. Soc. Am. 133 EL320
Google Scholar
[12] Zheng G Y, Yang T C, Ma Q M, et al. 2020 J. Acoust. Soc. Am. 148 347
Google Scholar
[13] Lei Z X, Yang K D, Ma Y L 2016 J. Acoust. Soc. Am. 139 EL19
Google Scholar
[14] 韩志斌, 彭朝晖, 刘雄厚 2020 69 114301
Google Scholar
Han Z B, Peng Z H, Liu X H 2020 Acta Phys. Sin. 69 114301
Google Scholar
[15] 胡治国, 李整林, 张仁和等 2016 65 014303
Google Scholar
Hu Z G, Li Z L, Zhang R H, et al. 2016 Acta Phys. Sin. 65 014303
Google Scholar
[16] 吴俊楠, 周士弘, 张岩 2016 中国科学: 物理学 力学 天文学 46 014303
Google Scholar
Wu J N, Zhou S H, Zhang Y 2016 Acta Phys. Sin. 46 014303
Google Scholar
[17] Weng J B, Yang Y M 2018 IEEE J. Oceanic Eng. 43 1171
Google Scholar
[18] Jensen F B, Kuperman W A, Porter M B, Schmidt H 2011 Computation Ocean Acoustic (2nd Ed.) (New York: Springer) pp169–171
[19] Srinivasan S, Srinivasan R 2018 IEEE Trans. Image Process. 16 2688
-
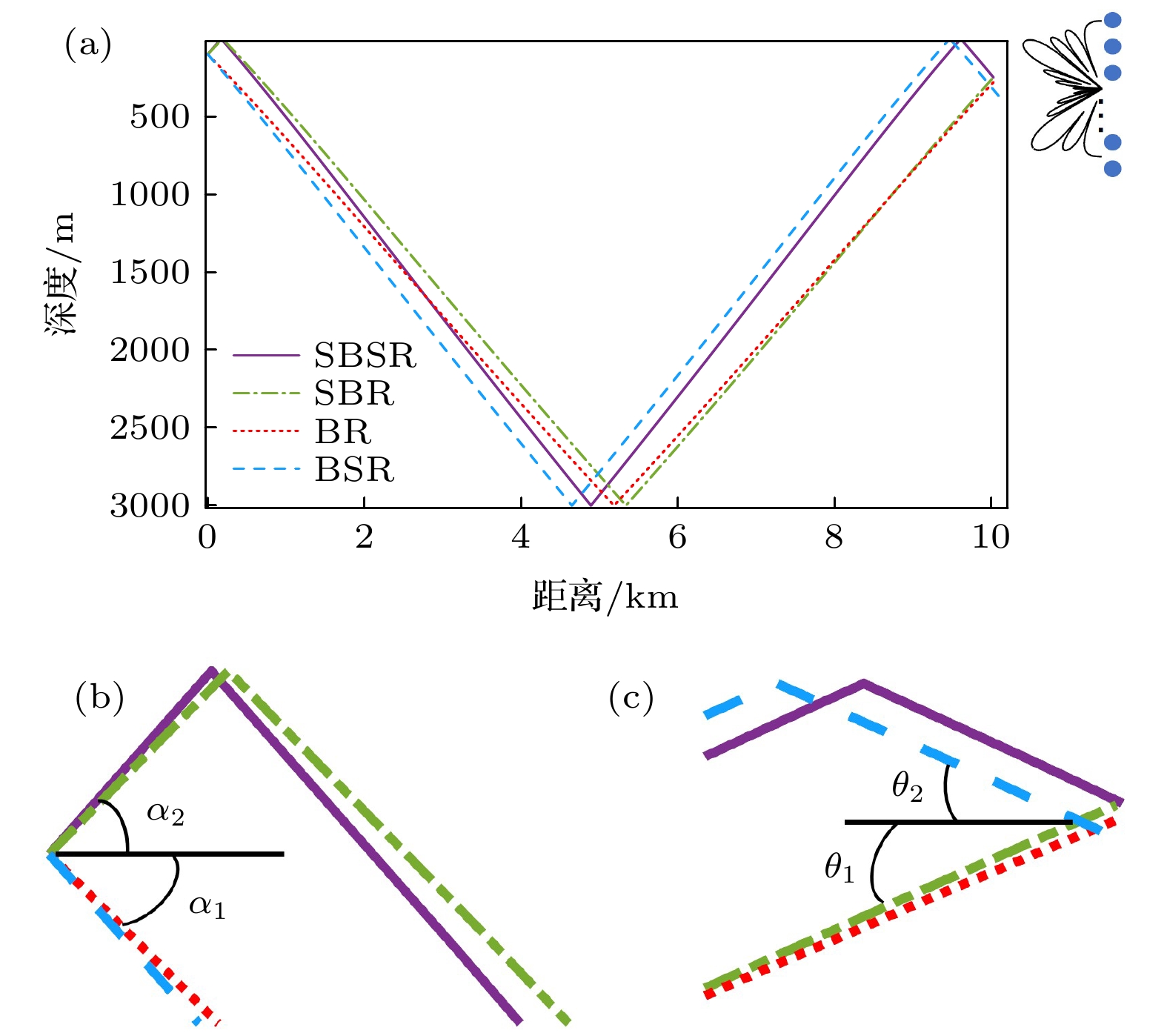
图 1 海底弹射区特征声线示意图 (a) 声线轨迹; (b)声源处局部放大; (c)接收处局部放大
Figure 1. Eigenray in bottom bounce area: (a) Eigenray path; (b) amplification at sound source position; (c) amplification at receiving position
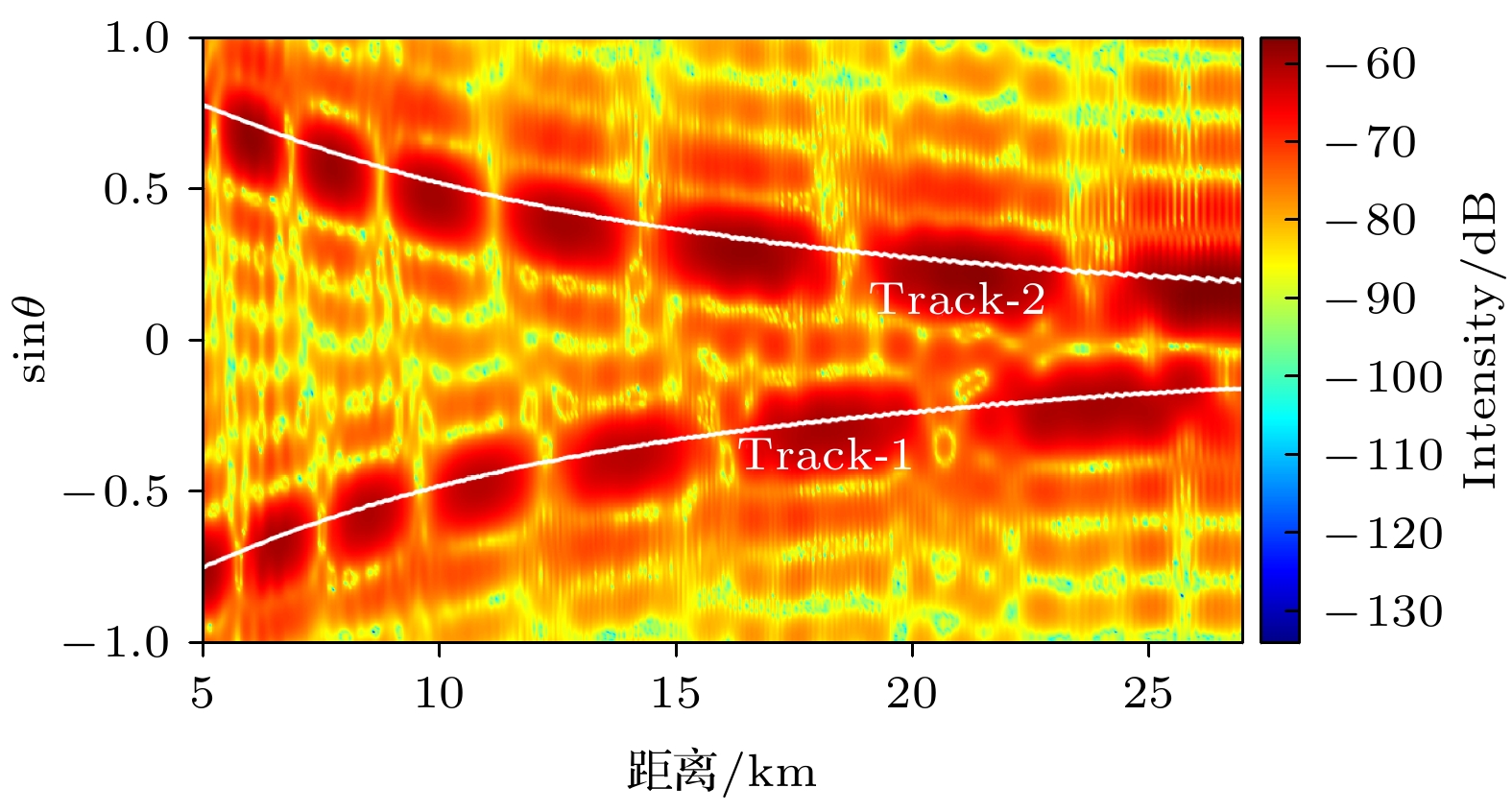
图 2 角度-距离干涉结构
Figure 2. Angle-range interference pattern
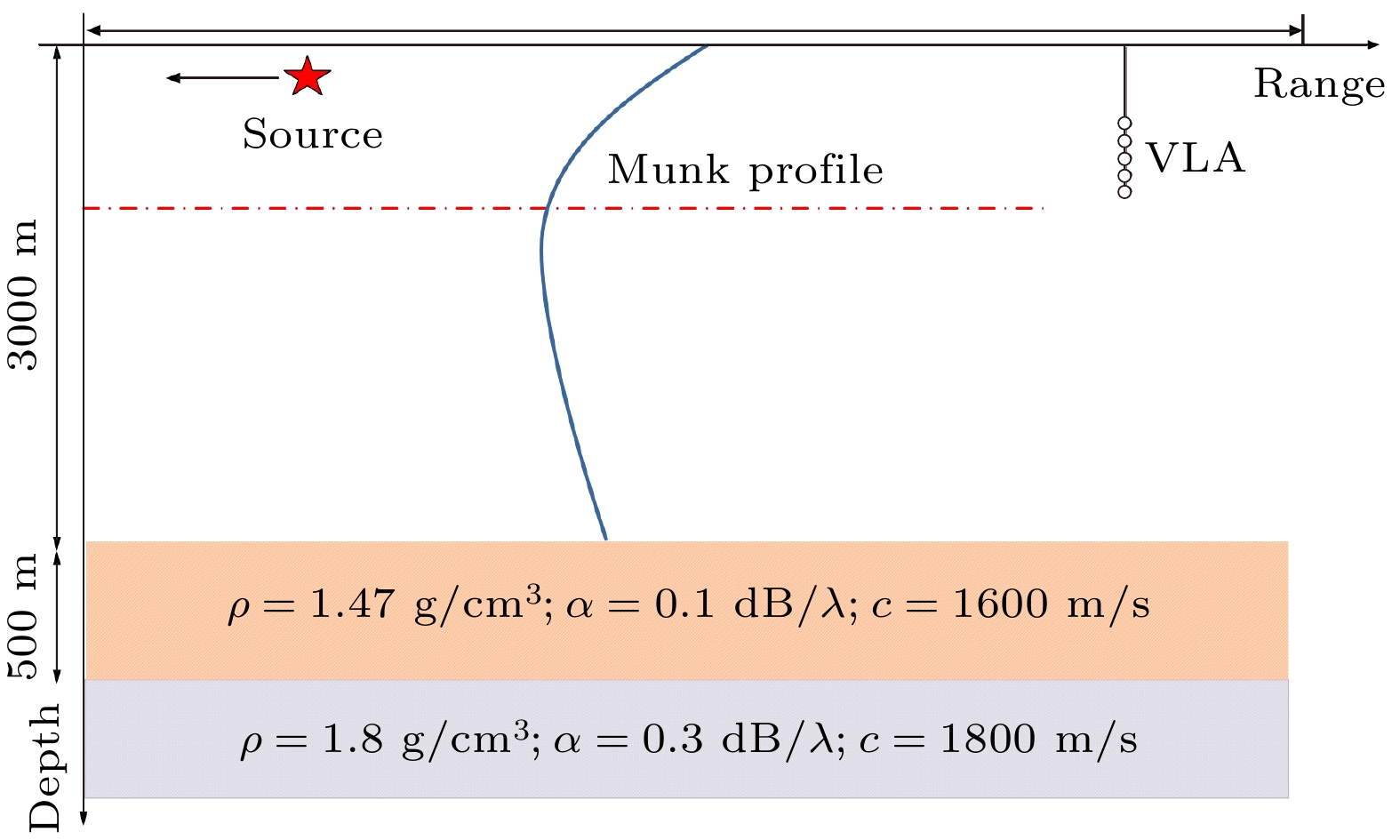
图 3 仿真环境示意图
Figure 3. Environment for simulation
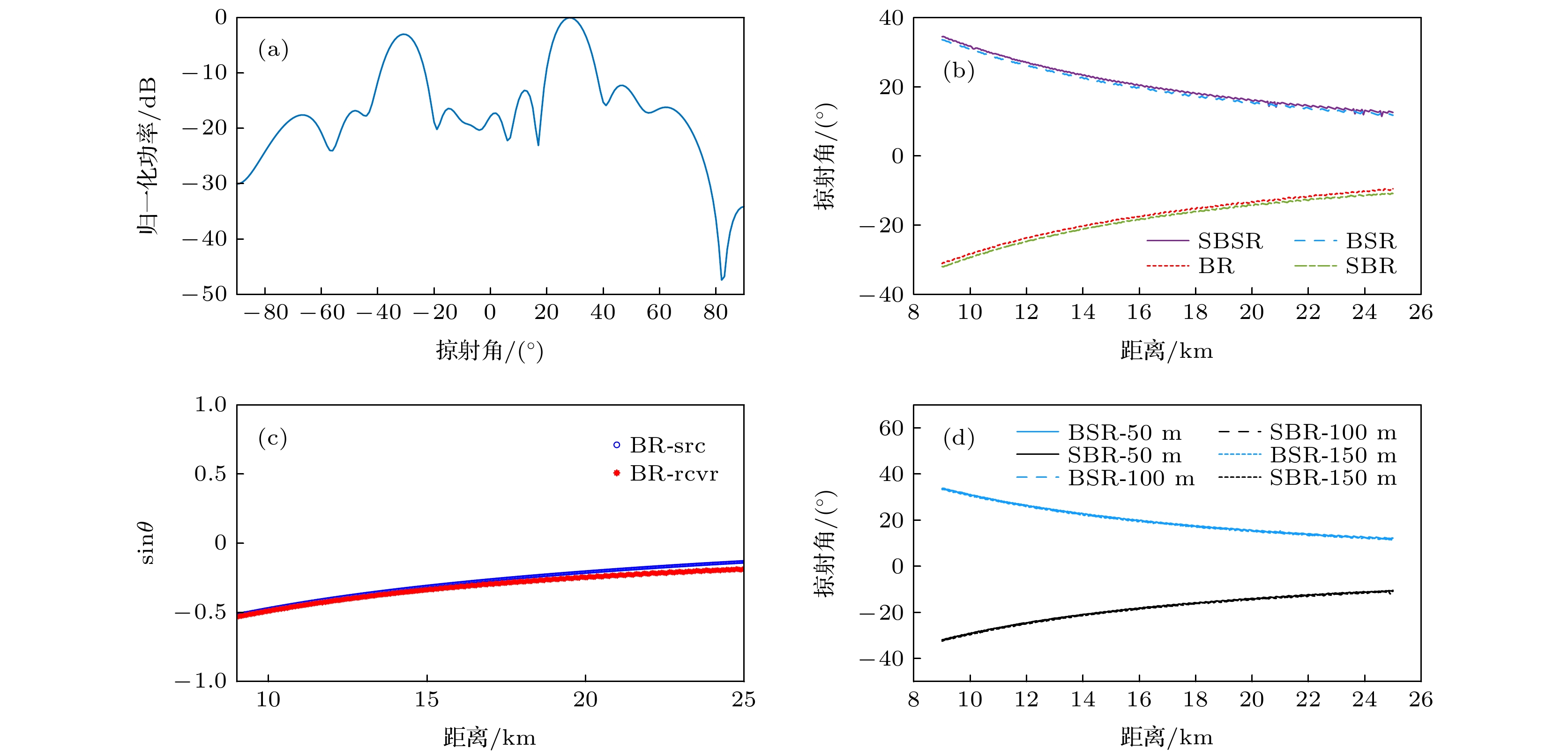
图 4 海底弹射区到达角特性 (a) 声源深度为100 m, 距离10 km时, 垂直阵波束形成对应的归一化空间谱; (b)四条本征声线到达角随距离的变化; (c) BR到达角与出射角的正弦值随距离的变化; (d)声源位于不同深度时, 两类到达角随距离的变化
Figure 4. Characteristics of arrival angel in bottom bounce area: (a) Normalized spatial spectrum of vertical line array (VLA) with the source depth of 100 m, range of 10 km; (b) arrival angle of four eigen-rays verse range; (c) the sine value of BR’s arrival angle and exit angle verse range; (d) two kinds of arrival angles verse range at different source depths

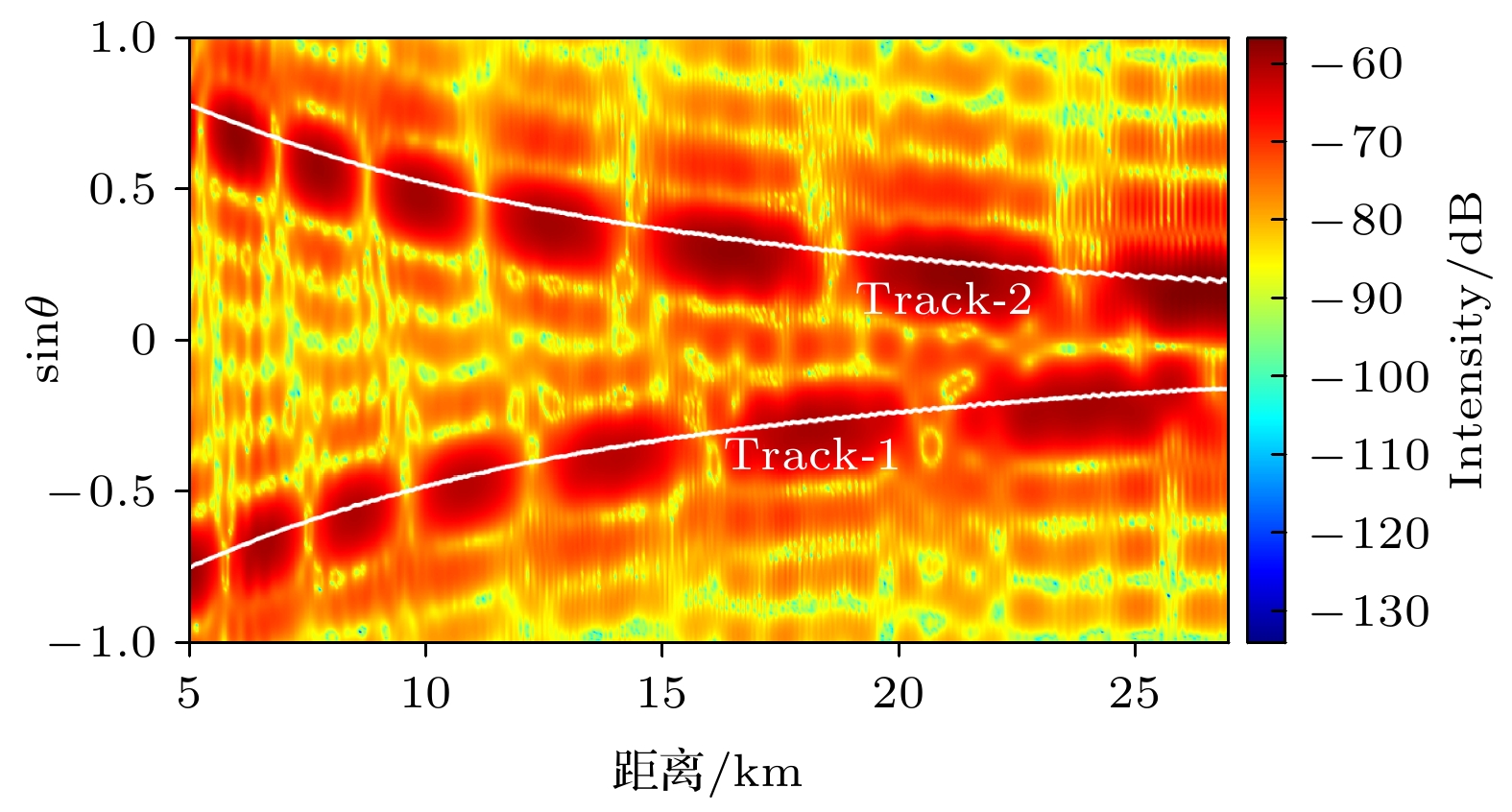
图 5 不同深度和声源频率的角度-距离干涉结构 (a) 声源深度50 m, 频率200 Hz; (b)声源深度100 m, 频率100 Hz; (c)声源距离8 km处, 图(b)干涉结构角度方向切片; (d)图(a)和(b)两种干涉结构提取的峰值轨迹1
Figure 5. Angle-range interference pattern: (a) Source depth of 50 m, frequency of 200 Hz; (b) source depth of 100 m, frequency of 100 Hz; (c) slice of interference pattern (b) with source range of 8 km; (d) peak stripe track-1 of panels (a) and (b)
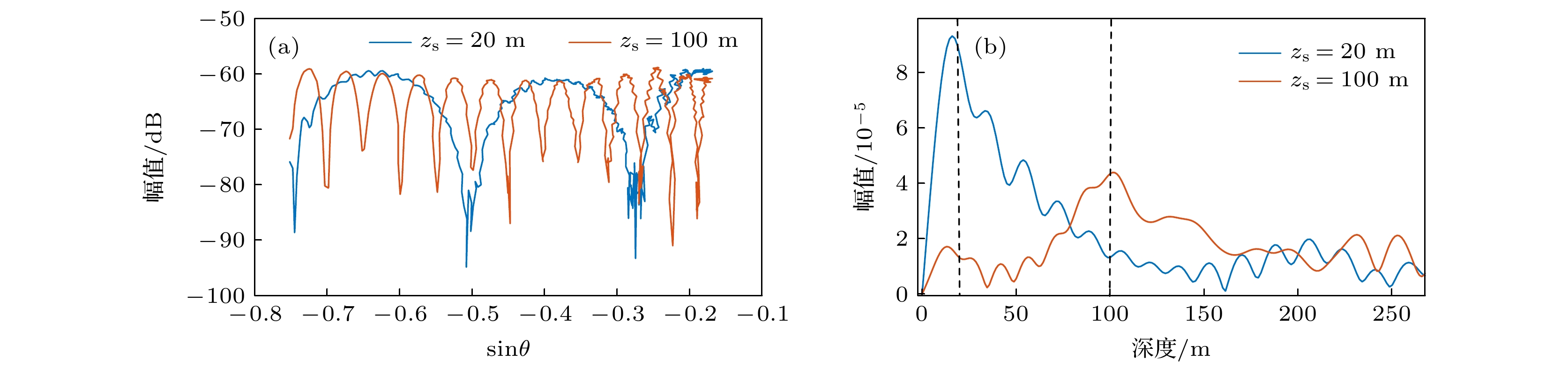
图 6 声源深度为20和100 m、频率为150 Hz、 无噪声时的深度估计结果 (a) 峰值条纹1轨迹; (b)深度模糊函数
Figure 6. Depth estimate result without noise at the source depth of 20 and 100 m, frequency of 200 Hz: (a) Peak stripe track-1; (b) depth estimation ambiguous function

图 7 两种声源运动距离对应的深度模糊函数
Figure 7. Depth ambiguity function corresponding to two kinds of sources moving distance

图 8 声源深度为100 m, 声源频率为150 Hz时对应的角度-距离干涉结构 (a) 原始干涉结构; (b)
$k=2$ 时重构干涉结构; (c)$k=4$ 时重构干涉结构; (d)$k=6$ 时重构干涉结构Figure 8. Angle-range interference pattern corresponding to the source depth of 100 m and frequency of 150 Hz: (a) Original interference pattern; (b) reconstructed interfernce pattern with
$k=2$ ; (c) reconstructed interfernce pattern with$k=4$ ; (d) reconstructed interfernce pattern with$k=6$ 
图 9 声源深度为100 m、声源频率为150 Hz、信噪比为–5 dB时对应的(a)原始干涉结构、(b)深度估计模糊函数、(c)重构干涉结构和(d)深度估计模糊函数
Figure 9. (a) Original interference pattern, (b) depth estimation ambiguous function, (c) reconstructed interfernce pattern, and (d) depth estimation ambiguous function with the source depth of 100 m, frequency of 150 Hz, SNR of –5 dB:
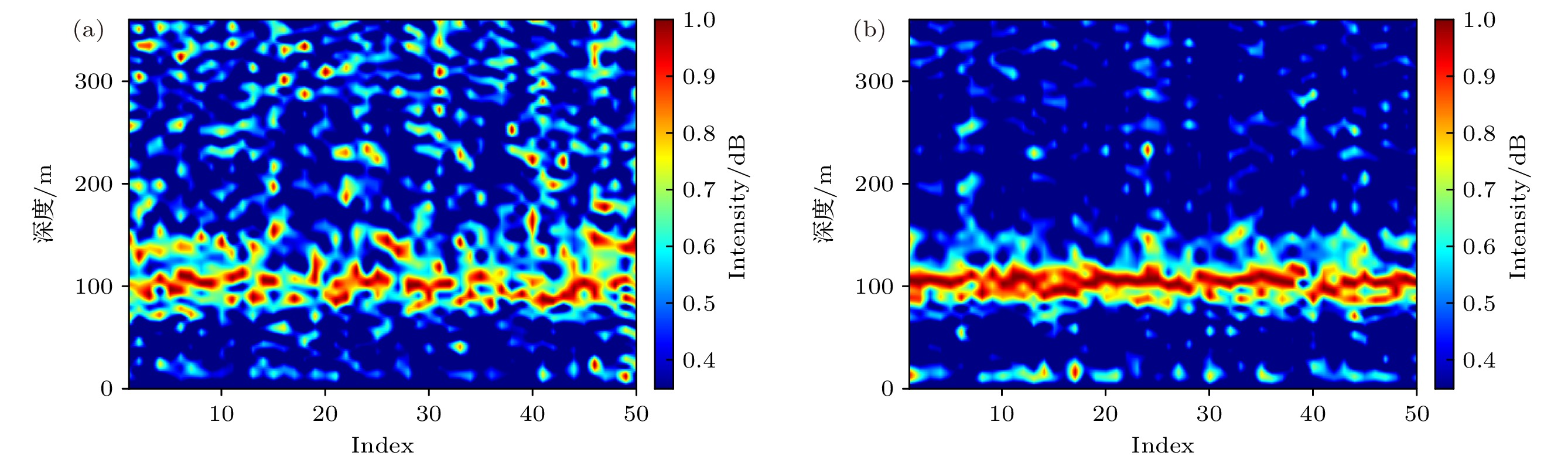
图 10 声源深度为100 m、声源频率为150 Hz、信噪比为–4 dB时, 50次蒙特卡罗实验结果 (a) 原始干涉结构得到的深度估计结果; (b)重构干涉结构得到的深度估计结果
Figure 10. Results of 50 times Monte Carlo experiment with source depth of 100 m, frequency of 150 Hz, SNR of –4 dB: (a) Depth estimation result from original interference pattern; (b) depth estimation result from reconstructed interference pattern
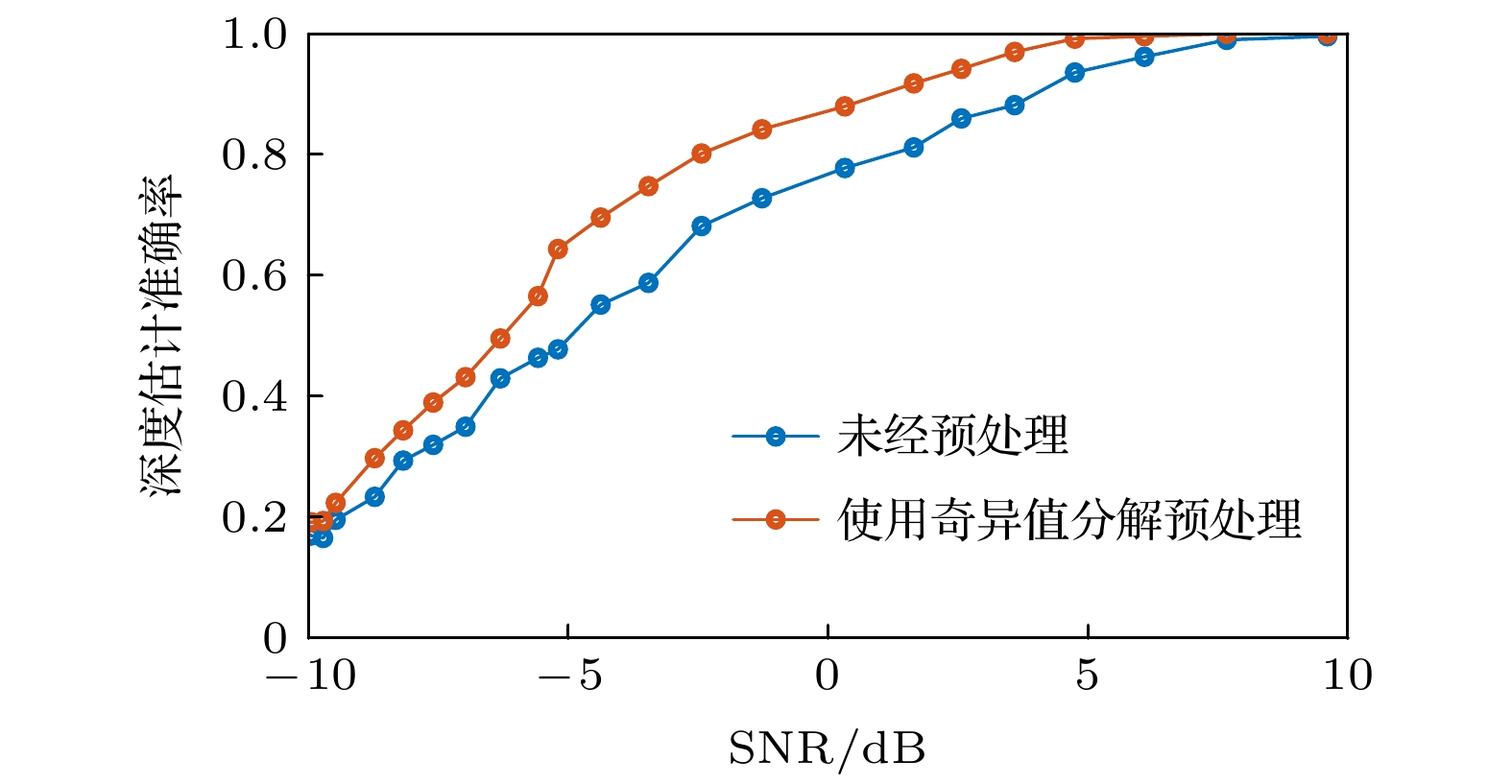
图 11 未重构和重构后深度估计准确率随信噪比的变化
Figure 11. Accuracy of depth estimation versus SNR using the original interference pattern and the reconstructed interference patter
表 1 不同信噪比条件下深度估计的准确率
Table 1. Accuracy of depth estimation at different SNR conditions
SNR k 3 7 11 16 5 dB 9.3% 97.0% 99.8% 98.6% 0 dB 7.8% 83.7% 89.2% 84.4% –5 dB 6.6% 64.8% 76.0% 65.8%  DownLoad: CSV
DownLoad: CSV
-
[1] Hinich M J 1979 J. Acoust. Soc. Am. 66 480
Google Scholar
[2] Debever C, Kuperman W A 2007 J. Acoust. Soc. Am. 122 1979
Google Scholar
[3] Yang T C 1979 J. Acoust. Soc. Am. 82 1736
[4] Yang T C 2014 J. Acoust. Soc. Am. 135 1218
Google Scholar
[5] Wang W B, Ni H Y, Su L, et al. 2019 J. Acoust. Soc. Am. 146 EL317
Google Scholar
[6] Liu Y N, Niu H Q, Li Z L 2020 J. Acoust. Soc. Am. 148 873
Google Scholar
[7] Neilsen T B, Escobar-Amado C D, Acree M C, et al. 2021 J. Acoust. Soc. Am. 149 692
Google Scholar
[8] Liu Y N, Niu H Q, Li Z L, et al. 2021 JASA Express Lett. 1 036002
Google Scholar
[9] Duan R, Yang K D, Ma Y L, et al. 2012 Chin. Phys. B 21 124301
Google Scholar
[10] Duan R, Yang K D, Li H, et al. 2019 J. Acoust. Soc. Am. 145 903
Google Scholar
[11] Mccargar R, Zurk L M 2013 J. Acoust. Soc. Am. 133 EL320
Google Scholar
[12] Zheng G Y, Yang T C, Ma Q M, et al. 2020 J. Acoust. Soc. Am. 148 347
Google Scholar
[13] Lei Z X, Yang K D, Ma Y L 2016 J. Acoust. Soc. Am. 139 EL19
Google Scholar
[14] 韩志斌, 彭朝晖, 刘雄厚 2020 69 114301
Google Scholar
Han Z B, Peng Z H, Liu X H 2020 Acta Phys. Sin. 69 114301
Google Scholar
[15] 胡治国, 李整林, 张仁和等 2016 65 014303
Google Scholar
Hu Z G, Li Z L, Zhang R H, et al. 2016 Acta Phys. Sin. 65 014303
Google Scholar
[16] 吴俊楠, 周士弘, 张岩 2016 中国科学: 物理学 力学 天文学 46 014303
Google Scholar
Wu J N, Zhou S H, Zhang Y 2016 Acta Phys. Sin. 46 014303
Google Scholar
[17] Weng J B, Yang Y M 2018 IEEE J. Oceanic Eng. 43 1171
Google Scholar
[18] Jensen F B, Kuperman W A, Porter M B, Schmidt H 2011 Computation Ocean Acoustic (2nd Ed.) (New York: Springer) pp169–171
[19] Srinivasan S, Srinivasan R 2018 IEEE Trans. Image Process. 16 2688



 DownLoad:
DownLoad:
















Catalog
Metrics
- Abstract views: 6118
- PDF Downloads: 149
- Cited By: 0
