










-
绝对重力仪在地球物理等领域有着广泛的应用, 其普遍采用激光干涉式或原子干涉式的测量原理. 现有的绝对重力仪主要利用垂直隔振系统来减小地面振动对参考镜的影响以提升仪器的测量精密度. 但在激光干涉式绝对重力仪中, 隔振系统对仪器自振效应等固定相位振动噪声的响应可能引入系统误差, 即影响测量准确度; 在原子干涉式绝对重力仪中也可能有尚未标定的振动来源通过隔振系统引入系统误差. 本文对现有绝对重力仪中使用的4种典型隔振系统进行理论分析及仿真建模, 以自振脉冲、地脉动和随机振动这3种典型信号为输入, 分析激光干涉式绝对重力仪中隔振系统内参考镜的真实振动及其对重力测值的影响, 并通过实验对比评估了其中两种系统在实际重力仪中的性能. 结果表明, 当仪器运行期间存在自振脉冲等固定相位振动噪声时, 隔振系统中参考镜振动引入的系统误差可能达到10 μGal (1 μGal = 1 × 10–8 m/s2)及以上. 使用性能更好的隔振系统或在实际测量中对该系统误差进行修正, 有望进一步提高国产激光干涉式绝对重力仪的测量精度.Absolute gravimeter, an instrument which is applied to laser interferometry or atom interferometry for measuring the gravitational acceleration g (approximately 9.8 m/s2), plays an important role in metrology, geophysics, geological exploration, etc. To achieve a high accuracy of several microGals (μGal, 1μGal = 1 × 10–8 m/s2), a vertical vibration isolator is widely employed in the absolute gravimeter to protect the reference object (a retro-reflector or a mirror) from being disturbed by ground vibration noises. However, the reference object in vibration isolator may still move due to isolator’s response to the impulse caused by the self-vibration effect in laser-interferometry gravimeter, or the forced vibration of the ferromagnetic component in the isolator under the varying magnetic field of magneto-optical traps (MOTs) in atom-interferometry gravimeter. This vibration of the reference object has a fixed phase relative to the detection of the free-fall of a falling object or atoms, leading an additional systematic error to be introduced into measured g value. In this paper, the physical models of four typical vertical vibration isolators used in the current absolute gravimeters are introduced, i.e. a passive Minus K isolator, a passive Lacoste isolator, a one-stage active isolator, and a double-stage active isolator. The simulation models of these isolators are also created with specific resonance periods. Taking a laser-interferometry gravimeter for example, the responses of these isolators under impulse input are analyzed, proving that the real vibration of the reference object, namely the output of each isolator, has a fixed phase relative to the detection of the fringe signal, which indicates the trajectory of the free-falling object, hence resulting in an additional systematic error. To provide a detailed evaluation, firstly the vibration of the reference object under an impulse, a seismic noise, and a random noise, which represent typical ground vibrations, are obtained by running the simulation. Then the corresponding errors in the calculation of g value are presented. Besides, the experimental results of T-1 laser-interferometry gravimeter at a noisy site in Tsinghua University, with either a Minus K isolator or a Superspring isolator used, are compared with the simulated results. According to the above simulations and experiments, the systematic error introduced by the vibration of resonance object in a Minus K isolator or a one-stage active isolator under impulse can respectively exceed 600 μGal or 10 μGal, while the error with the object in a Lacoste isolator or a double-stage active isolator can be neglected. Therefore, it is better to use a double-stage active vibration isolator in absolute gravimeter to avoid this systematic error and achieve higher measurement accuracy. With more information about the forced vibration in the isolators under varying magnetic fields of MOT, the systematic error introduced by the vibration of reference object can also be specifically evaluated in the future.
-
Keywords:
- absolute gravimeter /
- vertical vibration isolator /
- self-vibration effect /
- systematic error
[1] Marson I, Faller J E 1986 J. Phys. E:Sci. Instrum. 19 22
 Google Scholar
Google Scholar
[2] Faller J E 2002 Metrologia 39 425
Google Scholar
[3] Steiner R L, Williams E R, Newell D B, Liu R 2005 Metrologia 42 431
Google Scholar
[4] Timmen L, Gitlein O, Klemann V, Wolf D 2011 Pure Appl. Geophys. 169 1331
Google Scholar
[5] Niebauer T M, Sasagawa G S, Faller J E, Hilt R, Klopping F 1995 Metrologia 32 159
Google Scholar
[6] D'Agostino G, Desogus S, Germak A, et al. 2008 Ann. Geophys. 51 39
[7] 胡华, 伍康, 申磊, 李刚, 王力军 2012 61 099101
Google Scholar
Hu H, Wu K, Shen L, Li G, Wang L J 2012 Acta Phys. Sin. 61 099101
Google Scholar
[8] 吴书清, 李春剑, 徐进义, 粟多武, 冯金扬, 吉望西 2017 计量学报 38 01
Google Scholar
Wu S Q, Li C J, Xu J Y, Su D W, Feng J Y, Ji W X 2017 Acta Metrol. Sin. 38 01
Google Scholar
[9] Kasevich M, Chu S 1991 Phys. Rev. Lett. 67 181
Google Scholar
[10] Le Gouët J, Mehlstäubler T, Kim J, Merlet S, Clairon A, Landragin A, Pereira Dos Santos F 2008 Appl. Phys. B 92 133
Google Scholar
[11] Wang S K, Zhao Y, Zhuang W, Li T C, Wu S Q, Feng J Y, Li C J 2018 Metrologia 55 360
Google Scholar
[12] Hu Z K, Sun B L, Duan X C, Zhou M K, Chen L L, Zhan S, Zhang Q Z, Luo J 2013 Phys. Rev. A 88 043610
Google Scholar
[13] Wang Q, Wang Z, Fu Z, Liu W, Lin Q 2016 Opt. Commun. 358 82
Google Scholar
[14] Peterson J 1993 Observations and Modeling of Seismic Background Noise (U.S. Geological Survey) Report 93-322
[15] Sorrells G G, Douze E J 1974 J. Geophys. Res. 79 4908
Google Scholar
[16] Cessaro R K, Chan W 1989 J. Geophys. Res. -Solid Earth 94 15555
Google Scholar
[17] Chen L L, Luo Q, Zhang H, Duan X C, Zhou M K, Hu Z K 2018 Rev. Sci. Instrum. 89 066105
Google Scholar
[18] 陈非凡 2007 仪器设计技术基础 (北京: 清华大学出版社) 第410−430页
Chen F F 2007 Fundamental Technology for Instrument Design (Beijing: Tsinghua Unversity Press) pp410−430 (in Chinese)
[19] International Vocabulary of Metrology—Basic and General Concepts and Associated Terms (VIM), JCGM 2012 https://www.bipm.org/utils/common/documents/jcgm/JCGM_200_2012.pdf [2021-03-29]
[20] 李玉和, 郭阳宽 2010 现代精密仪器设计(第2版) (北京: 清华大学出版社) 第57−59页
Li Y H, Guo Y K 2010 Design of Modern Precision Instrument (2nd Ed.) (Beijing: Tsinghua University Press) pp57−59 (in Chinese)
[21] 李哲 2016 博士学位论文 (北京: 清华大学)
Li Z 2016 Ph. D. Dissertation (Beijing: Tsinghua University) (in Chinese)
[22] LaCoste Jr L J B 1934 Physics 5 178
Google Scholar
[23] Stochino A, Abbot B, Aso Y, et al. 2009 Nucl. Instrum. Methods Phys. Res. A, Accel. Spectrom. Detect. Assoc. Equip. 598 737
Google Scholar
[24] Winterflood J, Blair D G, Slagmolen B 2002 Phys. Lett. A 300 122
Google Scholar
[25] Platus D L 1993 Machine Design 65 123
[26] Li G, Hu H, Wu K, Wang G, Wang L J 2014 Rev. Sci. Instrum. 85 104502
Google Scholar
[27] Hensley J M, Peters A, Chu S 1999 Rev. Sci. Instrum. 70 2735
Google Scholar
[28] Tang B, Zhou L, Xiong Z, Wang J, Zhan M 2014 Rev. Sci. Instrum. 85 093109
Google Scholar
[29] Rinker R L 1983 Ph. D. Dissertation (Boulder: University of Colorado)
[30] Wu K, Li G, Hu H, Wang L 2017 Chin. J. Mech. Eng. 30 164
Google Scholar
[31] Wang G, Wu K, Hu H, Li G, Wang L 2016 Rev. Sci. Instrum. 87 105101
Google Scholar
[32] Yao J, Wu K, Guo M, Wang G, Wang L 2020 IEEE Trans. Instrum. Meas. 69 2670
Google Scholar
[33] 要佳敏 2020 博士学位论文 (北京: 清华大学)
Yao J M 2020 Ph. D. Dissertation (Beijing: Tsinghua University) (in Chinese)
[34] Guo M, Wu K, Yao J, Wen Y, Wang L 2021 IEEE Trans. Instrum. Meas. 70 1004310
Google Scholar
[35] Francis O, Baumann H, Ullrich C, et al. 2015 Metrologia 52 07009
Google Scholar
[36] FG5-X Absolute Gravimeter User's Manual, Micro-g Lacoste http://microglacoste.com/wp-content/uploads/2018/01/FG5-X-Manual-115060001.pdf [2021-06-03]
-

图 2 (a) 被动式隔振系统的物理模型; (b) 一级主动式隔振系统的物理模型; (c) 二级主动式隔振系统的物理模型
Fig. 2. Physical models: (a) Passive vibration isolator; (b) one-stage active vibration isolator; (c) double-stage active vibration isolator
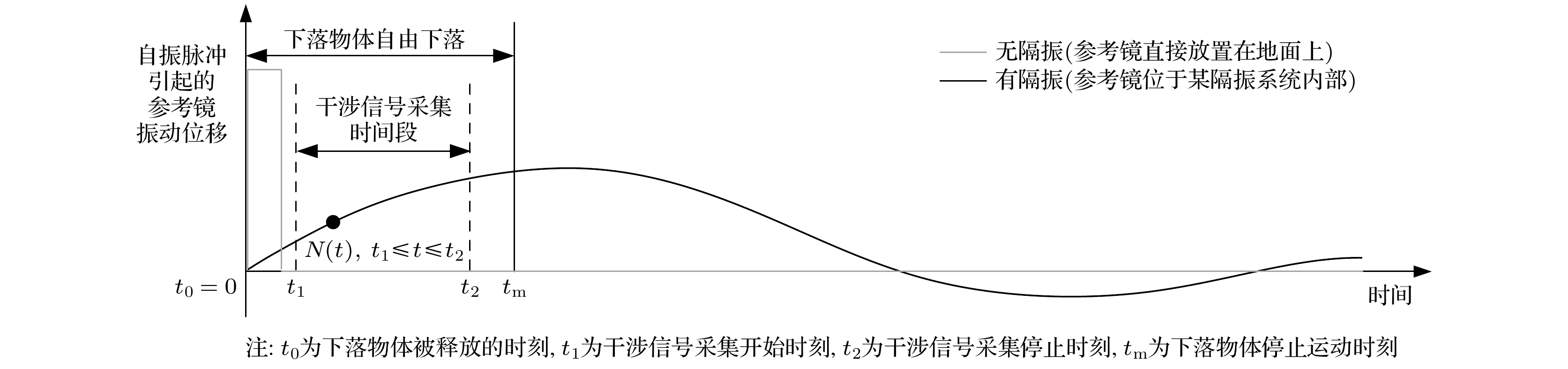
图 3 自振脉冲输入下隔振系统内参考镜的振动
Fig. 3. Real vibration of reference retro-reflector in a vibration isolator under the impulse caused by self-vibration effect.
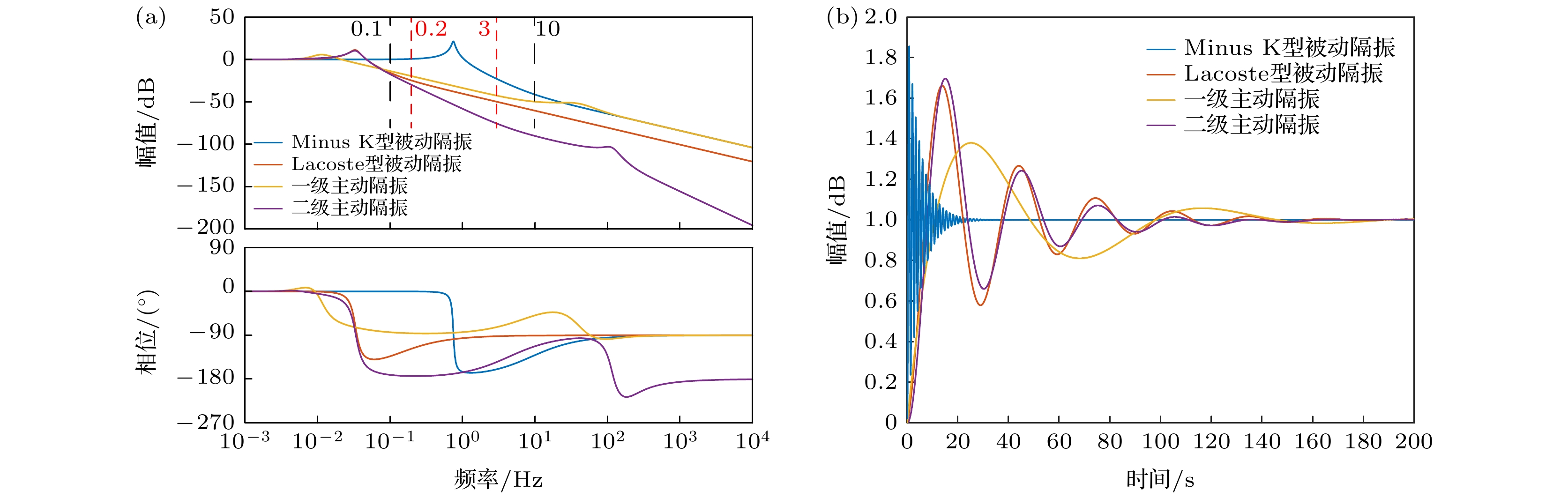
图 5 4种隔振系统 (a)传递函数伯德图; (b)阶跃响应
Fig. 5. Four vibration isolators used in simulation: (a) Bode diagrams; (b) step responses.

图 6 综合振动输入下参考镜振动对光学重力仪引入的(a)单组重力测量误差, (b) 12组重力测量误差, 图(b)中误差条为每组测值的标准差
Fig. 6. Measurement errors of obtained from (a) one data set and (b) 12 data sets introduced in laser-interferometry absolute gravimeter by the vibration of retro-reflector under impulse, seismic noise and random noise, with the error bar in (b) indicating the standard deviation of each set.
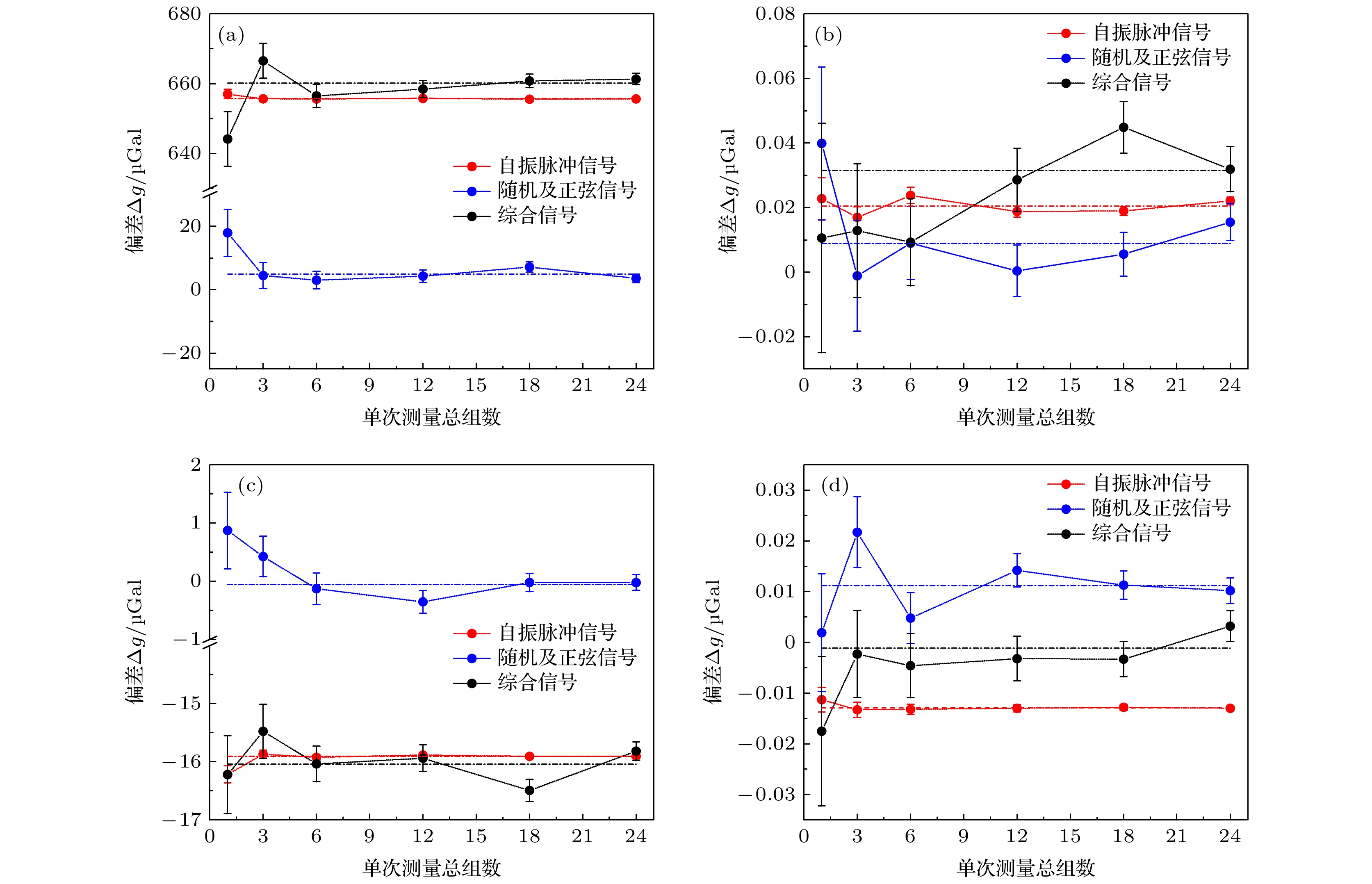
图 7 参考镜振动对光学重力仪引入的测量误差随测量组数的变化 (a) Minus K型被动隔振系统; (b) Lacoste型被动隔振系统; (c) 一级主动隔振系统; (d) 二级主动隔振系统
Fig. 7. Measurement errors introduced in laser-interferometry absolute gravimeter by the vibration of retro-reflector, varying with the numbers of data sets used in simulation: (a) Minus K passive vibration isolator; (b) Lacoste passive vibration isolator; (c) one-stage active vibration isolator; (d) double-stage active vibration isolator.
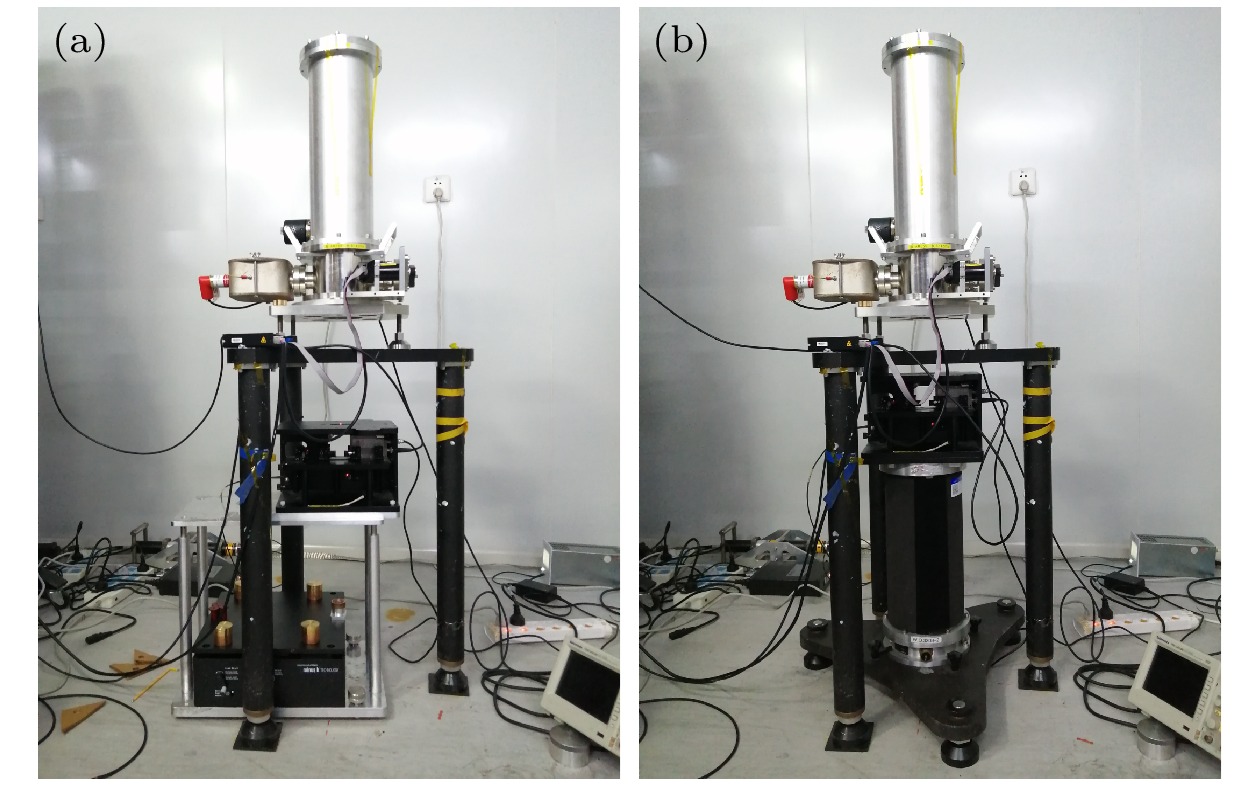
图 8 实验验证现场图 (a) 干涉仪下方放置Minus K型被动式系统; (b) 干涉仪下方放置Superspring二级主动式系统
Fig. 8. Picture of absolute gravimeter with (a) Minus K passive vibration isolator or (b) Superspring double-stage active vibration isolator.

图 9 实际测量结果(a)及相同振动输入下的仿真结果(b)
Fig. 9. Measurement results (a) and simulation results (b) of g values under the same vibration input.
表 1 仿真运算参数表
Table 1. Parameters used in simulation.
测量参数 数值 振动信号 参数 数值 单次测量中采集的
下落物体运动时长/ms120 信号1: 自振效应导致的脉冲 速度/(mm·s–1) 0.1 采集电路触发时刻与下落物体释放瞬间的延时/ms 30 信号2: 第1种地脉动
(正弦信号)幅值/nm 5 单组测量包含的下落次数 100 信号2: 第1种地脉动
(正弦信号)频率/Hz 0.2 单组测量期间相邻两次测量的时间间隔/s 20 信号3: 第2种地脉动
(正弦信号)幅值/nm 2 相邻两组测量的时间间隔/h 1 信号3: 第2种地脉动
(正弦信号)频率/Hz 3 总测量组数 12 信号4: 代表随机振动的
高斯白噪声PSD
/(m2·Hz–1)2.5×10–17  下载: 导出CSV
下载: 导出CSV
表 2 基于12组仿真数据得到的参考镜振动对光学重力仪引入的测量误差(单位: μGal)
Table 2. Measurement errors introduced in laser-interferometry absolute gravimeter by the vibration of retro-reflector, obtained from 12 data sets simulated results (unit: μGal)
隔振类型 输入信号 自振脉冲
(信号1)地脉动及随机振动
(信号2—4)综合振动
(信号1—4)无隔振 5.1 ± 15.1 21.0 ± 74.9 –121.8 ± 90.4 Minus K型
(被动式)655.8 ± 0.4 2.1 ± 2.0 658.5 ± 2.5 Lacoste型
(被动式)0.0 ± 0.0 0.0 ± 0.0 0.0 ± 0.0 一级主动式 –15.9 ± 0.0 –0.4 ± 0.2 –15.9 ± 0.2 二级主动式 0.0 ± 0.0 0.0 ± 0.0 0.0 ± 0.0
下载: 导出CSV
表 3 6组实际测量结果(单位: μGal)
Table 3. Measurement results obtained from 6 data sets (unit: μGal).
隔振类型 结果类型 实测结果
(综合信号)仿真结果
(综合信号)无隔振 –52.0 ± 110.0 –40.7 ± 123.3 Minus K型(被动式) 655.2 ± 77.8 656.5 ± 3.3 一级主动式 — –16.0 ± 0.3 Superspring型
二级主动式–6.7 ± 12.6 0.0 ± 0.0
下载: 导出CSV
表 4 采集过程起始时刻改变时的仿真结果(单位: μGal)
Table 4. One set of simulated results with different t1 (unit: μGal).
隔振类型 采样起点t1/ms 34 35 36 无隔振 –84.6 ± 314.7 215.6 ± 334.0 154.2 ± 294.5 Minus K型
(被动式)658.6 ± 8.1 660.8 ± 9.2 660.7 ± 7.7 一级主动式 –16.2 ± 0.7 –16.1 ± 0.8 –17.3 ± 0.7 二级主动式 0.0 ± 0.0 0.0 ± 0.0 0.1 ± 0.0
下载: 导出CSV
表 5 下落间隔改变时的仿真结果(单位: μGal)
Table 5. One set of simulated results with different drop interval (unit: μGal).
隔振类型 下落间隔/s 30 20 10 7 3 无隔振 –168.0 ± 328.5 215.6 ± 334.0 176.7 ± 281.9 49.7 ± 322.1 –281.3 ± 295.2 Minus K型(被动式) 658.5 ± 9.4 667.5 ± 8.1 631.2 ± 9.2 937.9 ± 8.7 1037.1 ± 8.5 一级主动式 –16.3 ± 0.7 –15.4 ± 0.8 –15.7 ± 0.7 –16.5 ± 0.8 –16.8 ± 0.8 二级主动式 0.0 ± 0.0 0.0 ± 0.0 0.1 ± 0.0 0.1 ± 0.0 0.2 ± 0.0
下载: 导出CSV
表 6 使用多种正弦函数模拟地脉动时的仿真结果(单位: μGal)
Table 6. One set of simulated results with multiple sinusoidal signals as the seismic noise (unit: μGal)
隔振类型 地脉动信号 19个正弦信号 2个正弦信号 无隔振 226.3 ± 297.3 215.6 ± 334.0 Minus K型(被动式) 662.4 ± 8.3 644.2 ± 7.8 一级主动式 –15.1 ± 0.8 –16.2 ± 0.7 二级主动式 0.1 ± 0.0 0.0 ± 0.0
下载: 导出CSV
表 7 以16次下落的地震计原始数据为输入时的计算结果(单位: μGal)
Table 7. Results with the ground vibrations measured during 16 drops as input signal (unit: μGal).
隔振类型 结果类型 仿真值
(真实振动信号)仿真值
(设计信号)实测值 无隔振 –264.5 ± 849.3 –513.9 ± 678.3 471.5 ± 676.6 Minus K型
(被动式)646.0 ± 16.5 629.1 ± 18.8 876.7 ± 615.6 一级主动式 –12.1 ± 2.5 –17.9 ± 1.5 — 二级主动式 1.8 ± 0.1 0.0 ± 0.0 –20.0 ± 62.6
下载: 导出CSV
-
[1] Marson I, Faller J E 1986 J. Phys. E:Sci. Instrum. 19 22
Google Scholar
[2] Faller J E 2002 Metrologia 39 425
Google Scholar
[3] Steiner R L, Williams E R, Newell D B, Liu R 2005 Metrologia 42 431
Google Scholar
[4] Timmen L, Gitlein O, Klemann V, Wolf D 2011 Pure Appl. Geophys. 169 1331
Google Scholar
[5] Niebauer T M, Sasagawa G S, Faller J E, Hilt R, Klopping F 1995 Metrologia 32 159
Google Scholar
[6] D'Agostino G, Desogus S, Germak A, et al. 2008 Ann. Geophys. 51 39
[7] 胡华, 伍康, 申磊, 李刚, 王力军 2012 61 099101
Google Scholar
Hu H, Wu K, Shen L, Li G, Wang L J 2012 Acta Phys. Sin. 61 099101
Google Scholar
[8] 吴书清, 李春剑, 徐进义, 粟多武, 冯金扬, 吉望西 2017 计量学报 38 01
Google Scholar
Wu S Q, Li C J, Xu J Y, Su D W, Feng J Y, Ji W X 2017 Acta Metrol. Sin. 38 01
Google Scholar
[9] Kasevich M, Chu S 1991 Phys. Rev. Lett. 67 181
Google Scholar
[10] Le Gouët J, Mehlstäubler T, Kim J, Merlet S, Clairon A, Landragin A, Pereira Dos Santos F 2008 Appl. Phys. B 92 133
Google Scholar
[11] Wang S K, Zhao Y, Zhuang W, Li T C, Wu S Q, Feng J Y, Li C J 2018 Metrologia 55 360
Google Scholar
[12] Hu Z K, Sun B L, Duan X C, Zhou M K, Chen L L, Zhan S, Zhang Q Z, Luo J 2013 Phys. Rev. A 88 043610
Google Scholar
[13] Wang Q, Wang Z, Fu Z, Liu W, Lin Q 2016 Opt. Commun. 358 82
Google Scholar
[14] Peterson J 1993 Observations and Modeling of Seismic Background Noise (U.S. Geological Survey) Report 93-322
[15] Sorrells G G, Douze E J 1974 J. Geophys. Res. 79 4908
Google Scholar
[16] Cessaro R K, Chan W 1989 J. Geophys. Res. -Solid Earth 94 15555
Google Scholar
[17] Chen L L, Luo Q, Zhang H, Duan X C, Zhou M K, Hu Z K 2018 Rev. Sci. Instrum. 89 066105
Google Scholar
[18] 陈非凡 2007 仪器设计技术基础 (北京: 清华大学出版社) 第410−430页
Chen F F 2007 Fundamental Technology for Instrument Design (Beijing: Tsinghua Unversity Press) pp410−430 (in Chinese)
[19] International Vocabulary of Metrology—Basic and General Concepts and Associated Terms (VIM), JCGM 2012 https://www.bipm.org/utils/common/documents/jcgm/JCGM_200_2012.pdf [2021-03-29]
[20] 李玉和, 郭阳宽 2010 现代精密仪器设计(第2版) (北京: 清华大学出版社) 第57−59页
Li Y H, Guo Y K 2010 Design of Modern Precision Instrument (2nd Ed.) (Beijing: Tsinghua University Press) pp57−59 (in Chinese)
[21] 李哲 2016 博士学位论文 (北京: 清华大学)
Li Z 2016 Ph. D. Dissertation (Beijing: Tsinghua University) (in Chinese)
[22] LaCoste Jr L J B 1934 Physics 5 178
Google Scholar
[23] Stochino A, Abbot B, Aso Y, et al. 2009 Nucl. Instrum. Methods Phys. Res. A, Accel. Spectrom. Detect. Assoc. Equip. 598 737
Google Scholar
[24] Winterflood J, Blair D G, Slagmolen B 2002 Phys. Lett. A 300 122
Google Scholar
[25] Platus D L 1993 Machine Design 65 123
[26] Li G, Hu H, Wu K, Wang G, Wang L J 2014 Rev. Sci. Instrum. 85 104502
Google Scholar
[27] Hensley J M, Peters A, Chu S 1999 Rev. Sci. Instrum. 70 2735
Google Scholar
[28] Tang B, Zhou L, Xiong Z, Wang J, Zhan M 2014 Rev. Sci. Instrum. 85 093109
Google Scholar
[29] Rinker R L 1983 Ph. D. Dissertation (Boulder: University of Colorado)
[30] Wu K, Li G, Hu H, Wang L 2017 Chin. J. Mech. Eng. 30 164
Google Scholar
[31] Wang G, Wu K, Hu H, Li G, Wang L 2016 Rev. Sci. Instrum. 87 105101
Google Scholar
[32] Yao J, Wu K, Guo M, Wang G, Wang L 2020 IEEE Trans. Instrum. Meas. 69 2670
Google Scholar
[33] 要佳敏 2020 博士学位论文 (北京: 清华大学)
Yao J M 2020 Ph. D. Dissertation (Beijing: Tsinghua University) (in Chinese)
[34] Guo M, Wu K, Yao J, Wen Y, Wang L 2021 IEEE Trans. Instrum. Meas. 70 1004310
Google Scholar
[35] Francis O, Baumann H, Ullrich C, et al. 2015 Metrologia 52 07009
Google Scholar
[36] FG5-X Absolute Gravimeter User's Manual, Micro-g Lacoste http://microglacoste.com/wp-content/uploads/2018/01/FG5-X-Manual-115060001.pdf [2021-06-03]

 下载:
下载:








计量
- 文章访问数: 5392
- PDF下载量: 80
- 被引次数: 0
