










-
光子计数激光雷达技术具有极高的探测灵敏度与时间分辨率, 是极端条件下高精度目标信息获取的重要手段. 由于该技术通过探测单光子级的回波能量实现对目标信息的三维重建, 因此极易受噪声干扰, 导致成像质量严重降低. 基于高速电子门控的距离选通技术虽然可以有效抑制噪声, 但存在参数设计依靠经验、目标检测区间窄等问题. 本文提出一种在宽目标检测区间条件下的目标信息提取及三维重建方法, 首先通过对三维回波信息的获取机理及其概率模型进行分析, 获取目标信息分布范围并通过算法门控提取有效信息; 再采用高效的图像重建算法进一步提升三维重建的质量, 从而具有比基于纯硬件的去噪方法更强的抑噪能力. 实验结果显示, 在平均像素光子数仅为3.020, 且信号噪声比仅为0.106的极端条件下, 本文提出的目标信息提取方法可将信号噪声比提升19.330倍; 再配合高效的图像重建算法, 距离图像的重建信噪比相比于传统的互相关算法提升了33.520 dB, 大幅提升了强噪声环境下高精度目标信息获取的能力.Single photon LiDAR is considered as one of the most important tools in acquiring target information with high accuracy under extreme imaging conditions, as it offers single photon sensitivity and picosecond timing resolution. However, such technique sense the scene with the photons reflected by the target, thus resulting in severe degradation of image in presence of strong noise. Range gating with high-speed electronics is an effective way to suppress the noise, unfortunately, such technique suffers from manually selecting the parameters and limited gating width. This paper presents a target information extracting and image restoration method under large observation window, which first obtain the depth distribution of the target and extract the information within the range by analyzing the model of signal and noise, then further improve the image quality by adopting advanced image restoration algorithm and henceforth shows better results than those denoising method that purely relying on hardware. In the experiment, photon-per-pixel (PPP) was as low as 3.020 and signal-to-background ratio (SBR) was as low as 0.106, the proposed method is able to improve SBR with a factor of 19.330. Compared to classical algorithm named cross correlation, the reconstruction signal to noise ratio (RSNR) increased 33.520dB by further cooperating with advanced image restoration algorithm, thus improved the ability of sensing accurate target information under extreme cases.
[1] Li Z P, Ye J T, Huang X, Jiang P Y, Cao Y, Hong Y, Yu C, Zhang J, Zhang Q, Peng C Z, Xu F, Pan J W 2021 Optica 8 344
 Google Scholar
Google Scholar
[2] Maccarone A, Rocca F M D, Mccarthy A, Henderson R, Buller G S 2019 Opt. Express 27 28437
Google Scholar
[3] Becker W 著 (屈军乐 译) 2009 高级时间相关单光子计数技术 (北京: 科学出版社) 第19—41 页
Becker W (translated by Qu J L) 2009 Advanced Time-Correlated Single Photon Counting Techniques (Beijing: Science Press) pp19–41 (in Chinese)
[4] Wallace A M, Halimi A, Buller G S 2020 IEEE Trans. Veh. Technol. 69 7064
Google Scholar
[5] Pawlikowska A M, Halimi A, Lamb R A, Gerald S B 2017 Opt. Express 25 11919
Google Scholar
[6] Tobin R, Halimi A, Mccarthy A, Laurenzis M, Christnacher F, Buller G S 2019 Opt. Express 27 4590
Google Scholar
[7] Tobin R, Halimi A, Mccarthy A, Soan P J, Buller G S 2021 Sci. Rep. 11 11236
Google Scholar
[8] Li Z P, Xin H, Cao Y, Wang B, Li Y H, Jin W, Yu C, Zhang J, Zhang Q, Peng C Z, Xu F, Pan J W 2020 Photonics Res. 8 1532
Google Scholar
[9] 汪书潮, 苏秀琴, 朱文华, 陈松懋, 张振扬, 徐伟豪, 王定杰 2021 70 174304
Google Scholar
Wang S C, Su X Q, Zhu W H, Chen S M, Zhang Z Y, Xu W H, Wang D J 2021 Acta Phys. Sin. 70 174304
Google Scholar
[10] Halimi A, Tobin R, Mccarthy A, Bioucas-Dias J, McLaughlin S, Buller G S 2020 IEEE Trans. Comput. Imag. 6 138
Google Scholar
[11] Tachella J, Altmann Y, Ren X, Mccarthy A, Buller G S 2019 SIAM J. Imag. Sci. 12 521
Google Scholar
[12] Rapp J, Goyal V K 2017 IEEE Trans. Comput. Imag. 3 445
Google Scholar
[13] Rapp J, Dawson R M A, Goyal V K 2020 Opt. Express 28 35143
Google Scholar
[14] Greeley A P, Neumann T A, Kurtz N T, Markus T, Martino A J 2019 IEEE Trans. Geosci. Remote Sens. 57 6542
Google Scholar
[15] Tobing P L, Wu Y C, Hayashi T, Kobayashi K, Toda T 2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP) Barcelona, Spain, May 4–8, 2020, pp7204–7208.
[16] Jiang S, Zhi X, Zhang W, Wang D, Hu J, Chen W 2021 Opt. Laser Eng. 136 106311
Google Scholar
[17] Lindell D B, Mattew O, Gordon W 2018 ACM Trans. Graph. 113 12
[18] Chen S, Halimi A, Ren X, Mccarthy A, Su X, McLaughlin S, Buller G S 2020 IEEE Trans. Imag. Process. 29 3119
Google Scholar
[19] Hirschmuller H, Scharstein D 2007 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR) Minneapolis, Minnesota, USA, June 17–22, 2007, pp1–8.
[20] Scharstein D, Hirschmuller H, Kitajima Y, Krathwohl G, Nesic N, Wang X, Westling P 2014 German Conference on Pattern Recognition (GCPR) Munster, Germany, September 3–5, 2014, pp31–42.
[21] Ruget A, McLaughlin S, Henderson R K, Gyongy I, Halimi A, Leach J 2021 Opt. Express 29 11917
Google Scholar
-

图 1 光子计数激光雷达原理图 (a) 成像系统示意图; (b) 三维回波示意图
Fig. 1. The schematic diagram of photon counting LiDAR: (a) Description of the imaging system; (b) description of the three dimensional echo.
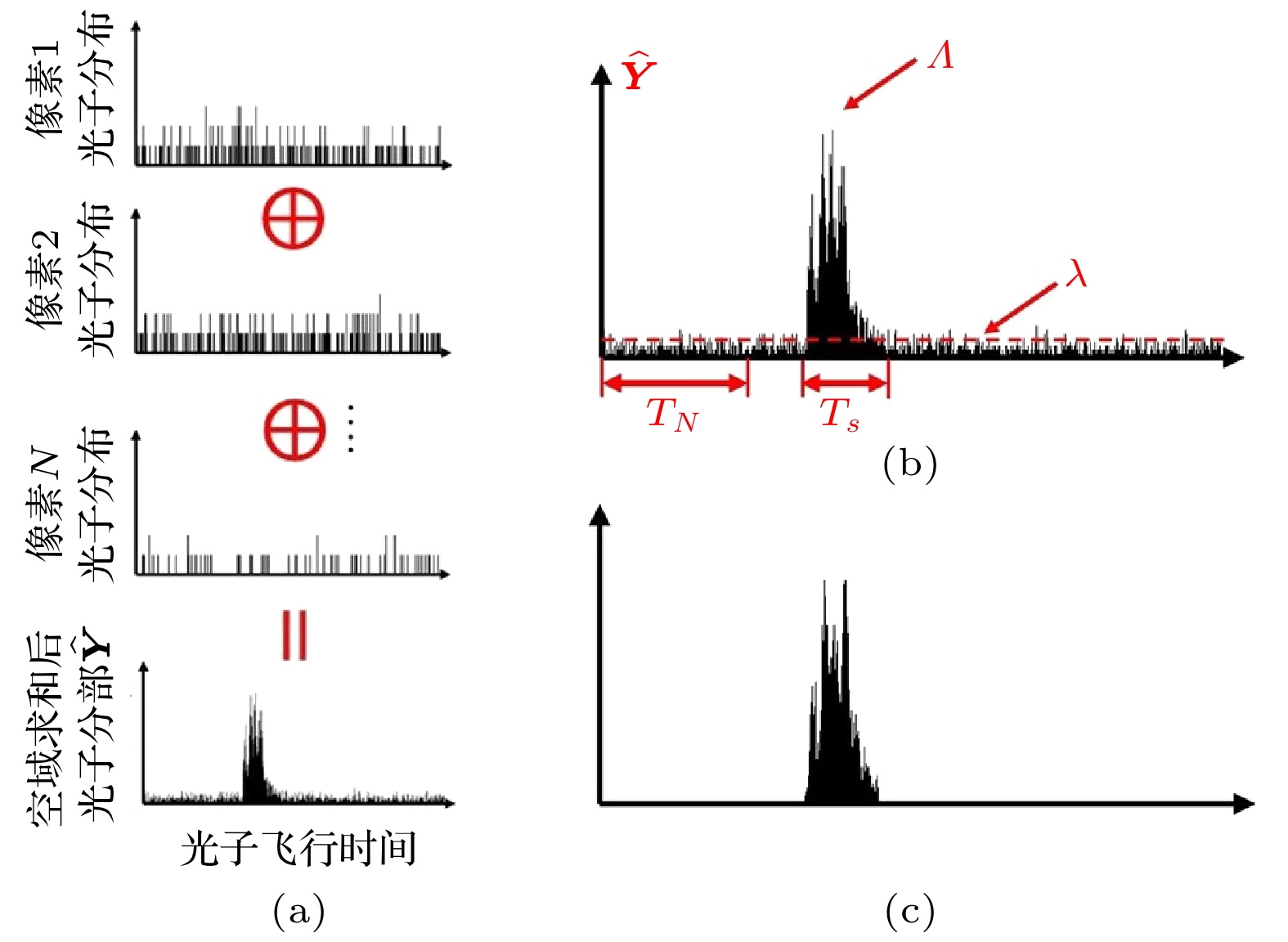
图 2 自适应信息提取过程示意图 (a) 空域求和示意图, 其中
$ \oplus $ 表示求和; (b) 特征参数示意图; (c) 目标信息的分布范围Fig. 2. The schematic diagram of adaptive information extracting: (a) Schematic diagram of the summing process on the spatial domain, where
$ \oplus $ stands for summing operation; (b) description of the feature parameters; (c) the distribution interval of the target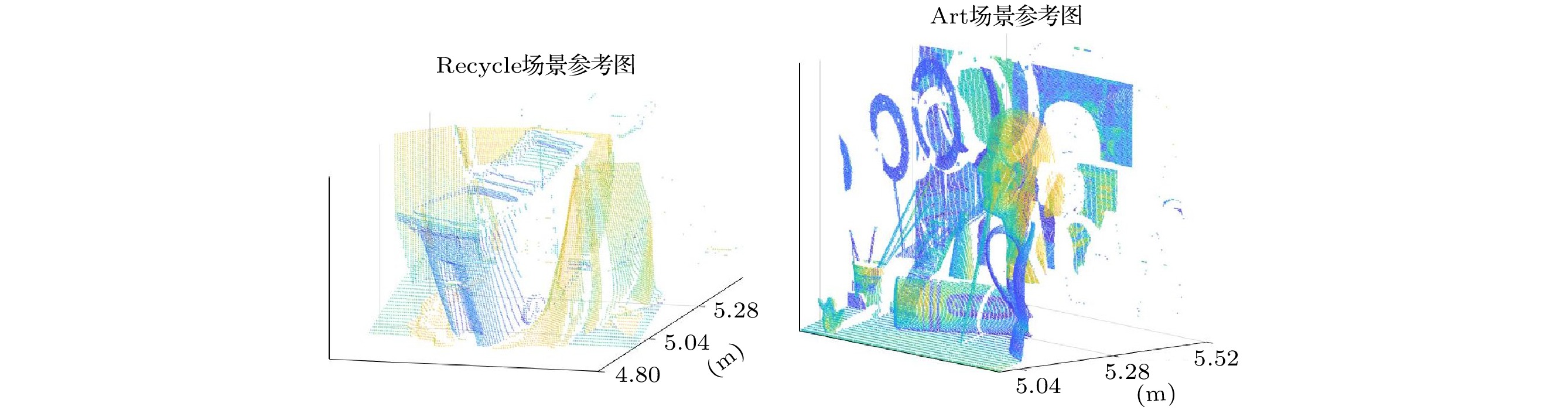
图 3 仿真场景参考图. 左图为Recycle场景参考图, 右图为Art场景参考图
Fig. 3. The reference image of the simulation scene. The reference image of Recycle scene and Art scene is shown in left and right respectively.
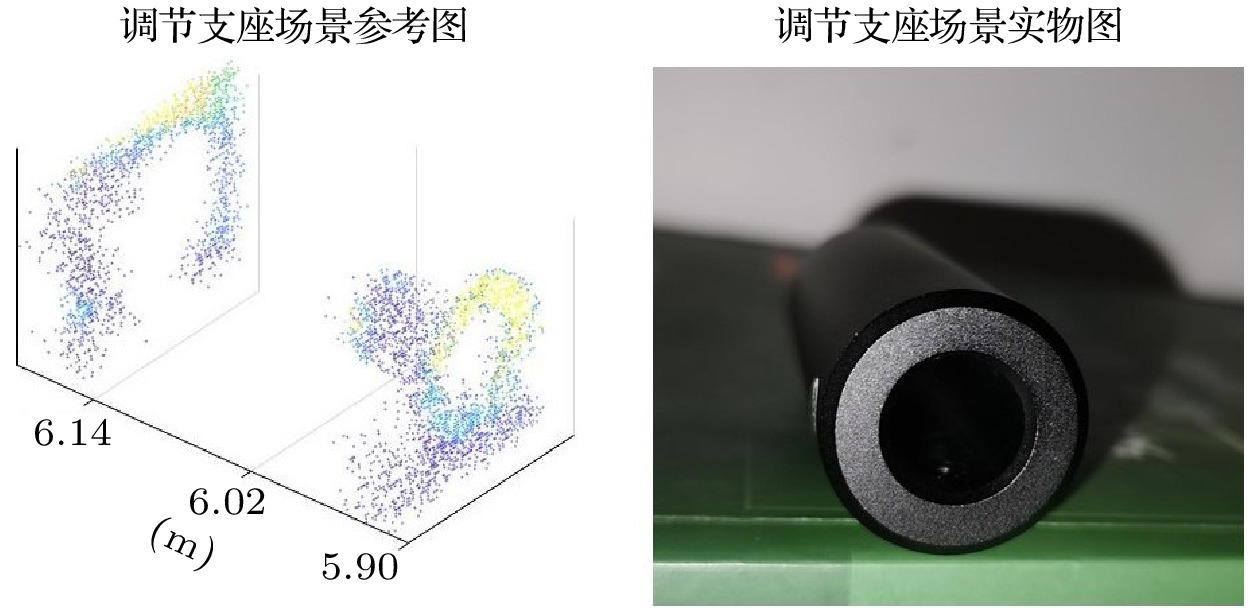
图 4 实测场景参考图及实物图. 左图为调节支座场景参考图, 右图为调节支座场景实物图
Fig. 4. The reference image and the physical map of the measured scene (i.e. supporting rod scene). The left image is the reference image of the supporting rod scene, and the right image is the physical map of the supporting rod scene

图 5 Recycle场景重建结果对比图
Fig. 5. The comparison of the restoration result of different algorithms under Recycle scene

图 6 Art场景重建结果对比图
Fig. 6. The comparison of the restoration result of different algorithms under Art scene
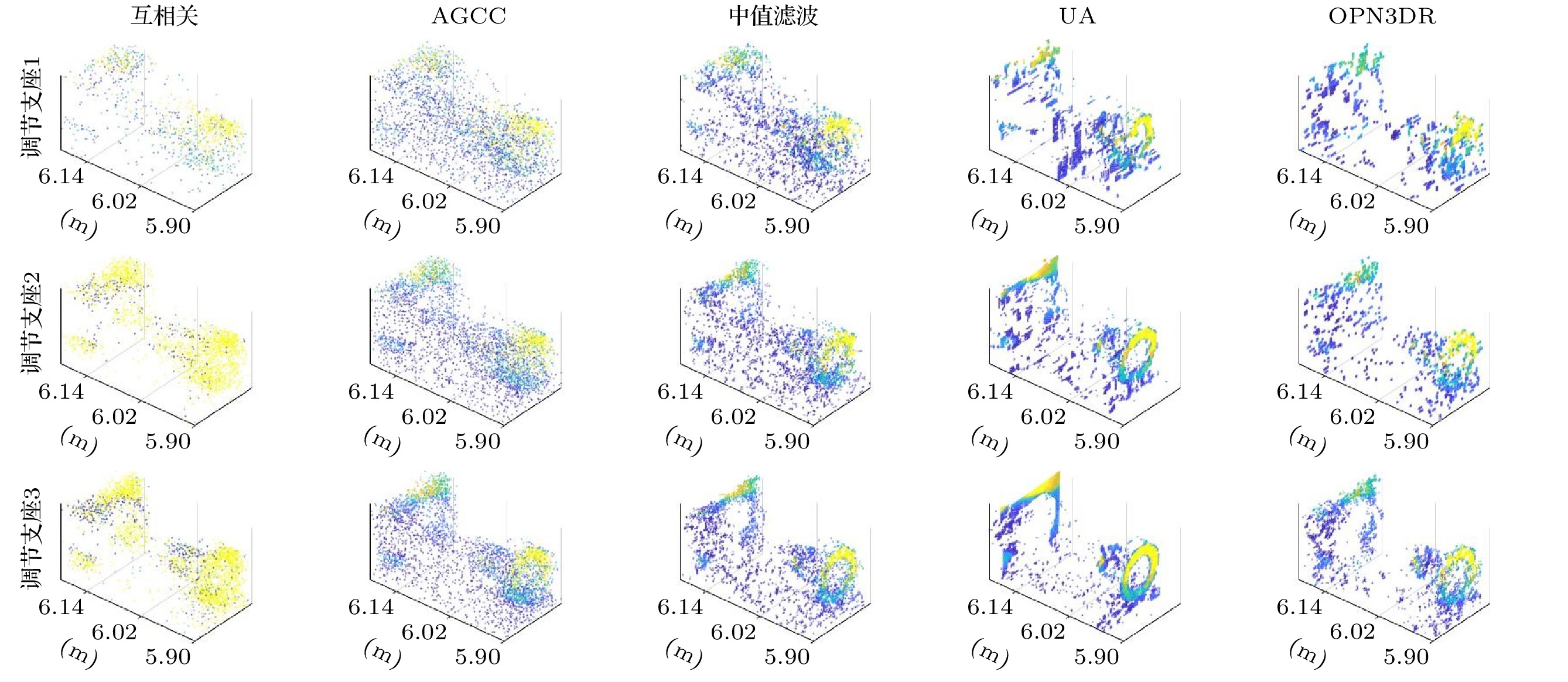
图 7 调节支座场景重建结果对比图
Fig. 7. The comparison of the result of different algorithms under supporting rod scene
Algorithm 1 基于自适应门控的噪声抑制(AGNR)算法 1: 输入: $ \widehat{{\boldsymbol Y}} $, γ, ω, σ
2: 初始化$ T_N $, N, λ, Λ, PPP, SBR, $\varepsilon$, $ i = 1 $
3: $\theta=\lambda \times N+(\varLambda-\lambda \times N) \times \frac{\omega}{\gamma}{\rm{e}}^{(-\frac{{\rm{SBR}}}{\gamma})}$
4: while $ i = 1 $ do
5: $ \{{\boldsymbol{\zeta}} = [T_a, T_b]\} \leftarrow (\widehat{{\boldsymbol Y}} > \theta) $
6: $E=|\sum_{i = T_a}^{T_b}\widehat{ {\boldsymbol Y} }-[{\rm{PPP}}+\lambda \times (T_b-T_a)] \times N|$
7: $T_{\rm{c} }= \Big\lceil \dfrac{E}{ \langle (\gamma/T) \times{\rm{ PPP} }, \lambda \rangle } \Big\rceil,$
8: $(\theta_1, \theta_2) \leftarrow [(\underrightarrow{\zeta})_{T_{\rm{c}}}, (\underleftarrow{\bar{\zeta} })_{T_{\rm{c}}}]$
9: 根据(7)式与(8)式计算$ E_1 $与$ E_2 $
10: $ \theta=(\theta_1, \theta_2) \leftarrow \lfloor E_1, E_2 \rfloor $
11: if $ E < \epsilon $ then
12: $ i = 0 $
13: end if
14: end while
15: $ ({\boldsymbol{\zeta}} > \gamma) \leftarrow 0 $
16: $ {\boldsymbol{\zeta}} \leftarrow \{[{\boldsymbol{\zeta}}-\sigma] \cup [{\boldsymbol{\zeta}}+\sigma\} $ 下载: 导出CSV
下载: 导出CSV
表 1 不同场景下AGNR算法的抑噪性能对比
Table 1. The noise reduction performance of AGNR algorithm under different scenarios
场景 Recycle Art 调节支座 Recycle1 Recycle2 Recycle3 Art1 Art2 Art3 调节支座1 调节支座2 调节支座3 PPP 0.951 6.226 12.727 0.833 4.664 11.553 3.020 30.044 150.144 SBR 0.581 0.127 0.031 0.013 0.114 0.014 0.106 0.104 0.104 $\textrm{SBR}^{’}$ 6.435 1.431 0.363 0.222 1.931 0.250 2.049 2.050 2.029 NRR ${11.076}$ ${11.268}$ ${11.710}$ ${17.077}$ ${16.939}$ ${17.857}$ ${19.330}$ ${19.712}$ ${19.510}$
下载: 导出CSV
表 2 不同重建算法在不同场景下RSNR对比(单位: dB)
Table 2. The RSNR of different reconstruction algorithms under different scenarios (in dB)
场景 评价对象 Recycle Art 调节支座 Recycle1 Recycle2 Recycle3 Art1 Art2 Art3 调节支座1 调节支座2 调节支座3 互相关 距离图 $-9.743$ $-8.533$ $-8.231$ $-15.597$ $-10.482$ $-10.848$ $-4.932$ $-3.023$ $-1.338$ 反射率图 $-4.101$ $-0.908$ $-3.691$ $-21.453$ $-3.504$ $-8.024$ $4.533$ $4.687$ $4.698$ AGCC 距离图 $11.524$ $17.961$ $17.577$ $12.862$ $19.789$ $19.633$ $22.352$ $24.751$ $26.369$ 反射率图 $0.114$ $6.433$ $6.062$ $-7.806$ $4.175$ $3.457$ $5.324$ $7.504$ $7.731$ 中值滤波 距离图 $13.954$ ${22.304}$ ${21.881}$ $18.552$ $27.340$ $26.903$ $24.389$ $25.909$ $26.788 $ 反射率图 $5.844$ $12.608$ $12.284$ $2.316$ ${10.584}$ $10.261$ $8.383$ $9.500$ $9.571$ UA 距离图 ${20.768}$ $21.318$ $21.321$ $20.519$ $24.761$ $24.764$ ${28.588}$ ${28.741}$ ${29.199}$ 反射率图 $3.304$ ${16.755}$ ${18.760}$ $5.513$ $10.034$ ${11.122}$ ${7.926}$ ${9.677}$ ${9.890}$ OPN3DR 距离图 $20.075$ $21.430$ $21.172$ ${22.767}$ ${27.453}$ ${27.397}$ $25.726$ $26.801$ $28.298$ 反射率图 ${11.093}$ $15.812$ $15.380$ ${8.910}$ $10.448$ $10.255$ $7.915$ $8.979$ $9.004$
下载: 导出CSV
表 3 不同重建算法的运行时间(单位: 秒)
Table 3. The processing time of different reconstruction algorithms (in seconds)
场景 Recycle Art 调节支座 ${\rm{Recycle1}}$ ${\rm{Recycle2}}$ ${\rm{ Recycle3}}$ ${\rm{Art1}}$ ${\rm{ Art2 }}$ ${\rm{Art3}}$ 调节支座1 调节支座2 调节支座3 互相关 0.679 0.690 0.711 2.663 2.693 2.720 0.273 0.260 0.286 AGCC 0.085 0.085 0.085 0.220 0.224 0.218 0.023 0.024 0.024 中值滤波 0.095 0.096 0.096 0.235 0.239 0.234 0.035 0.035 0.036 UA 6.290 7.759 10.787 20.335 13.517 19.832 4.320 5.073 8.711 OPN3DR 1.422 1.344 1.986 5.464 5.518 5.228 0.145 0.228 0.724
下载: 导出CSV
表 4 滤波方式与成像性能对比
Table 4. The comparison of the performance and the way of filtering.
场景 评价对象 距离图RSNR 反射率图RSNR 运行
时间/s调节支座1 多尺度滤波 ${27.441}$ $0.125$ $0.785$ 最大尺度滤波 $25.726$ ${7.915}$ ${0.145}$ 调节支座2 多尺度滤波 ${29.273}$ $1.218$ $0.772$ 最大尺度滤波 $26.801$ ${8.979}$ ${0.228}$ 调节支座3 多尺度滤波 ${30.552}$ $7.030$ $0.781$ 最大尺度滤波 $28.298$ ${9.004}$ ${0.724}$
下载: 导出CSV
-
[1] Li Z P, Ye J T, Huang X, Jiang P Y, Cao Y, Hong Y, Yu C, Zhang J, Zhang Q, Peng C Z, Xu F, Pan J W 2021 Optica 8 344
Google Scholar
[2] Maccarone A, Rocca F M D, Mccarthy A, Henderson R, Buller G S 2019 Opt. Express 27 28437
Google Scholar
[3] Becker W 著 (屈军乐 译) 2009 高级时间相关单光子计数技术 (北京: 科学出版社) 第19—41 页
Becker W (translated by Qu J L) 2009 Advanced Time-Correlated Single Photon Counting Techniques (Beijing: Science Press) pp19–41 (in Chinese)
[4] Wallace A M, Halimi A, Buller G S 2020 IEEE Trans. Veh. Technol. 69 7064
Google Scholar
[5] Pawlikowska A M, Halimi A, Lamb R A, Gerald S B 2017 Opt. Express 25 11919
Google Scholar
[6] Tobin R, Halimi A, Mccarthy A, Laurenzis M, Christnacher F, Buller G S 2019 Opt. Express 27 4590
Google Scholar
[7] Tobin R, Halimi A, Mccarthy A, Soan P J, Buller G S 2021 Sci. Rep. 11 11236
Google Scholar
[8] Li Z P, Xin H, Cao Y, Wang B, Li Y H, Jin W, Yu C, Zhang J, Zhang Q, Peng C Z, Xu F, Pan J W 2020 Photonics Res. 8 1532
Google Scholar
[9] 汪书潮, 苏秀琴, 朱文华, 陈松懋, 张振扬, 徐伟豪, 王定杰 2021 70 174304
Google Scholar
Wang S C, Su X Q, Zhu W H, Chen S M, Zhang Z Y, Xu W H, Wang D J 2021 Acta Phys. Sin. 70 174304
Google Scholar
[10] Halimi A, Tobin R, Mccarthy A, Bioucas-Dias J, McLaughlin S, Buller G S 2020 IEEE Trans. Comput. Imag. 6 138
Google Scholar
[11] Tachella J, Altmann Y, Ren X, Mccarthy A, Buller G S 2019 SIAM J. Imag. Sci. 12 521
Google Scholar
[12] Rapp J, Goyal V K 2017 IEEE Trans. Comput. Imag. 3 445
Google Scholar
[13] Rapp J, Dawson R M A, Goyal V K 2020 Opt. Express 28 35143
Google Scholar
[14] Greeley A P, Neumann T A, Kurtz N T, Markus T, Martino A J 2019 IEEE Trans. Geosci. Remote Sens. 57 6542
Google Scholar
[15] Tobing P L, Wu Y C, Hayashi T, Kobayashi K, Toda T 2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP) Barcelona, Spain, May 4–8, 2020, pp7204–7208.
[16] Jiang S, Zhi X, Zhang W, Wang D, Hu J, Chen W 2021 Opt. Laser Eng. 136 106311
Google Scholar
[17] Lindell D B, Mattew O, Gordon W 2018 ACM Trans. Graph. 113 12
[18] Chen S, Halimi A, Ren X, Mccarthy A, Su X, McLaughlin S, Buller G S 2020 IEEE Trans. Imag. Process. 29 3119
Google Scholar
[19] Hirschmuller H, Scharstein D 2007 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR) Minneapolis, Minnesota, USA, June 17–22, 2007, pp1–8.
[20] Scharstein D, Hirschmuller H, Kitajima Y, Krathwohl G, Nesic N, Wang X, Westling P 2014 German Conference on Pattern Recognition (GCPR) Munster, Germany, September 3–5, 2014, pp31–42.
[21] Ruget A, McLaughlin S, Henderson R K, Gyongy I, Halimi A, Leach J 2021 Opt. Express 29 11917
Google Scholar


 下载:
下载:








计量
- 文章访问数: 10107
- PDF下载量: 180
- 被引次数: 0
