










-
水下光学成像是探索水下奥秘的关键技术, 但是环境中介质吸收和背向散射效应会造成图像严重退化. 基于差分偏振的复原技术是水下图像复原技术的主要方法之一, 通过正交偏振图之间的共模抑制实现背景散射光的抑制, 但是相关研究表明该方法对于非均匀光场等情况的恢复效果一般, 其原因主要在于非均匀光场条件下偏振度和强度的估计误差. 针对上述问题, 本文提出融合偏振信息的多孔径水下成像技术, 该方法利用相机阵列实现虚拟大孔径成像系统, 从而获取广角光场信息, 进而融合场景的深度信息实现背景散射和偏振度的精确估计, 估计参数值能更好地反映场景的全局特征. 对浑浊水下环境中不同偏振度目标进行成像实验, 与目前先进的复原算法进行对比, 结果表明, 本文方法能够有效克服水下非均匀光场带来的问题, 得到高质量的复原结果.Underwater optical imaging is the key technology to explore the underwater mystery. However, due to the absorption and backscattering effects of the media in the underwater environment, the image acquired by the detector will be severely degraded. In order to obtain the effective underwater scene information, it is necessary to restore the acquired underwater image. The restoration technology based on differential polarization is one of the main methods of restoring the underwater images, which can suppress the background scattered light by the common-mode suppression between orthogonal polarization graphs, thus realizing the restoration of underwater image. However, the relevant research shows that the restoration effect of this method is general for the underwater non-uniform light field. The main reason is that the estimation errors of polarization degree and background scattering intensity under the condition of the non-uniform underwater light field are large. Out of the above problem, in this paper we present the multiple aperture underwater imaging technology of fused polarization information. The method uses the camera array to realize the large virtual aperture imaging system, thus obtaining the wide-angle light field information, and then to fuse the depth information of the scene to realize the accurate estimation of background scattering light intensity and polarization degree under the condition of underwater non-uniform light field. The estimated parameter value can better reflect the global characteristics of the scene. Through the imaging experiments on the targets with different polarization degrees in the turbid underwater environment, comparing with the current advanced restoration algorithm, the results show that the proposed method can effectively solve the problems of background scattering and polarization degree significant estimation error caused by non-uniform underwater light field, and obtain high-quality restoration results. Through the contrast imaging experiment of the target in the underwater environment with different turbidity concentrations, the results show that with the increase of turbidity concentration of the water, the image recovery effect of the method in this paper is gradually weakened. However, it still has a good restoration effect at a large concentration. At the same time, imaging experiments are conducted on targets in underwater environments with different sediment concentrations. The results show that the method proposed in this paper can also obtain a better restoration image in the turbid water environment containing sediment.
-
Keywords:
- underwater imaging /
- multiple aperture /
- backscattering /
- polarization degree
[1] 胡浩丰, 李校博, 刘铁根 2019 红外与激光工程 48 603006
 Google Scholar
Google Scholar
Hu H F, Li X B, Liu T G 2019 Infrared Laser Eng. 48 603006
Google Scholar
[2] 黄有为, 金伟其, 丁琨, 李海兰, 曹峰梅, 王霞 2009 红外与激光工程 38 669
Google Scholar
Huang Y W, Jin W Q, Ding K, Li H L, Cao F M, Wang X 2009 Infrared Laser Eng. 38 669
Google Scholar
[3] Emberton S, Chittka L, Cavallaro A 2018 Comput. Vis. Image Und. 168 145
Google Scholar
[4] 韩平丽, 刘飞, 张广, 陶禹, 邵晓鹏 2018 67 054202
Google Scholar
Han P L, Liu F, Zhang G, Tao Y, Shao X P 2018 Acta Phys. Sin. 67 054202
Google Scholar
[5] Li X, Hu H, Zhao L, Wang H, Yu Y, Wu L, Liu T G 2018 Sci. Rep. 8 12430
Google Scholar
[6] Lu H, Li Y, Nakashima S, Kim H, Serikawa S 2017 IEEE Access 5 670
Google Scholar
[7] 李黎, 王惠刚, 刘星 2017 光学学报 37 176
Google Scholar
Li L, Wang H G, Liu X 2017 Acta Optica Sin. 37 176
Google Scholar
[8] Zhang W F, Liang J, Ren L, Ju H J, Qu E S, Bai Z F, Tang Y, Wu Z X 2017 Appl. Optics 56 942
Google Scholar
[9] Mortazavi H, Oakley J P, Barkat B 2013 Meas. Sci. Technol. 24 074025
Google Scholar
[10] Skinner K A, Johnson-Roberson M 2017 IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW) Honolulu, USA, July 21−26, 2017 p1775
[11] Qu Y, Zou Z 2017 Opt. Express 25 25004
Google Scholar
[12] Schechner Y Y, Karpel N 2005 IEEE J. Oceanic Eng. 30 570
Google Scholar
[13] Hu H F, Zhao L, Li X B, Wang H, Liu T G 2018 IEEE Photonics J. 10 6900309
Google Scholar
[14] 周雯, 曹文熙, 李彩 2008 热带海洋学报 27 22
Google Scholar
Zou W, Cao W X, Li C 2008 Journal of Tropical Oceanography 27 22
Google Scholar
[15] Chami M, Marken E, Stamnes J J, Khomenko G, Korotaev G 2006 J. Geophys Res. 111 C05013
Google Scholar
[16] Zhou W, Wang G F, Sun Z H, Cao W X, Xu Z T, Hu S B, Zhao J 2012 Opt. Express 20 11189
Google Scholar
[17] Tan H, Oishi T, Tanaka A, Doerffer R 2015 Appl. Optics 54 7718
Google Scholar
[18] Tan H, Doerffer R, Oishi T and Tanaka A 2013 Opt. Express 21 18697
Google Scholar
[19] Joshi N, Avidan S, Matusik W, Kriegman D 2007 IEEE 11 th International Conference on Computer Vision (ICCV) Rio De Janeiro, Brazil, October 14−20 2007 p1
[20] 聂云峰, 相里斌, 周志良 2011 中国科学院大学学报 28 563
Nie Y F, Xiang L B, Zhou Z L 2011 Journal of Graduate University of Chinese Academy of Sciences 28 563
[21] Takahashi K, Naemura T 2006 Signal Process-Image. 21 519
Google Scholar
[22] Vaish V, Levoy M, Szeliski R, Zitnick C L, Kang S B 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR) New York, USA, June 17−22 2006 p2331
-

图 1 模拟浑浊水下多孔径成像实验现场图
Fig. 1. Simulated turbid underwater multiple aperture imaging experiment scene.

图 2 模拟浑浊水下目标图像恢复结果对比, 其中上图为玩偶图像恢复结果; 下图为金属币图像恢复结果 (a1), (a2) 拟合法估计的偏振度分布和背景散射; (b1), (b2) 重聚焦估计的偏振度分布和背景散射; (c1), (c2) 水平偏振图像; (d1), (d2) 垂直偏振图像; (e1), (e2) 拟合法恢复图像; (f1), (f2) 参考视角恢复图像; (g1), (g2) 多视角融合恢复图像
Fig. 2. Comparison of simulated turbid underwater target image recovery results. Up panel: Doll image recovery results. Down panel: Metal coin image recovery results. (a1), (a2) The polarization degree distribution and background scattering estimated by the fitting method; (b1), (b2) refocusing estimation of polarization degree distribution and background scattering; (c1), (c2) horizontally polarized image; (d1), (d2) vertically polarized images; (e1), (e2) image restoration by fitting method; (f1), (f2) image recovery from reference perspective; (g1), (g2) multi-perspective fusion to restore the image.
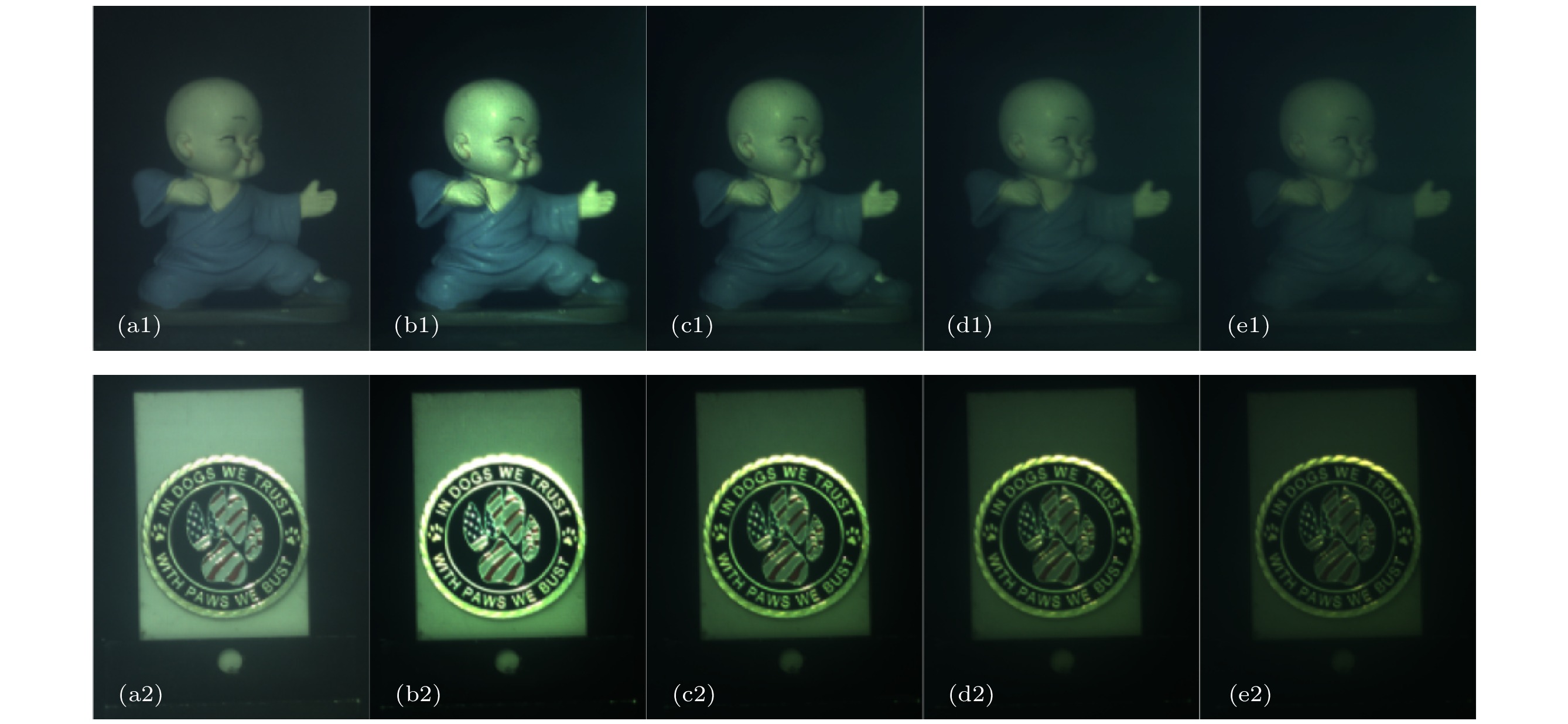
图 3 模拟不同浑浊浓度水下目标图像恢复结果对比, 其中上图为玩偶图像恢复结果; 下图为金属币图像恢复结果 (a1), (a2) 清水图像; (b1), (b2) 浓度1对应的复原图像; (c1), (c2) 浓度2对应的复原图像; (d1), (d2) 浓度3对应的复原图像; (e1), (e2) 浓度4对应的复原图像
Fig. 3. Comparison of simulated different turbid concentrations underwater target image recovery results. Up panel: Doll image recovery results. Down panel: Metal coin image recovery results. (a1), (a2) Images in clear water; (b1), (b2) the restoration image corresponding to concentration 1; (c1), (c2) the restoration image corresponding to concentration 2; (d1), (d2) the restoration image corresponding to concentration 3; (e1), (e2) the restoration image corresponding to concentration 4.
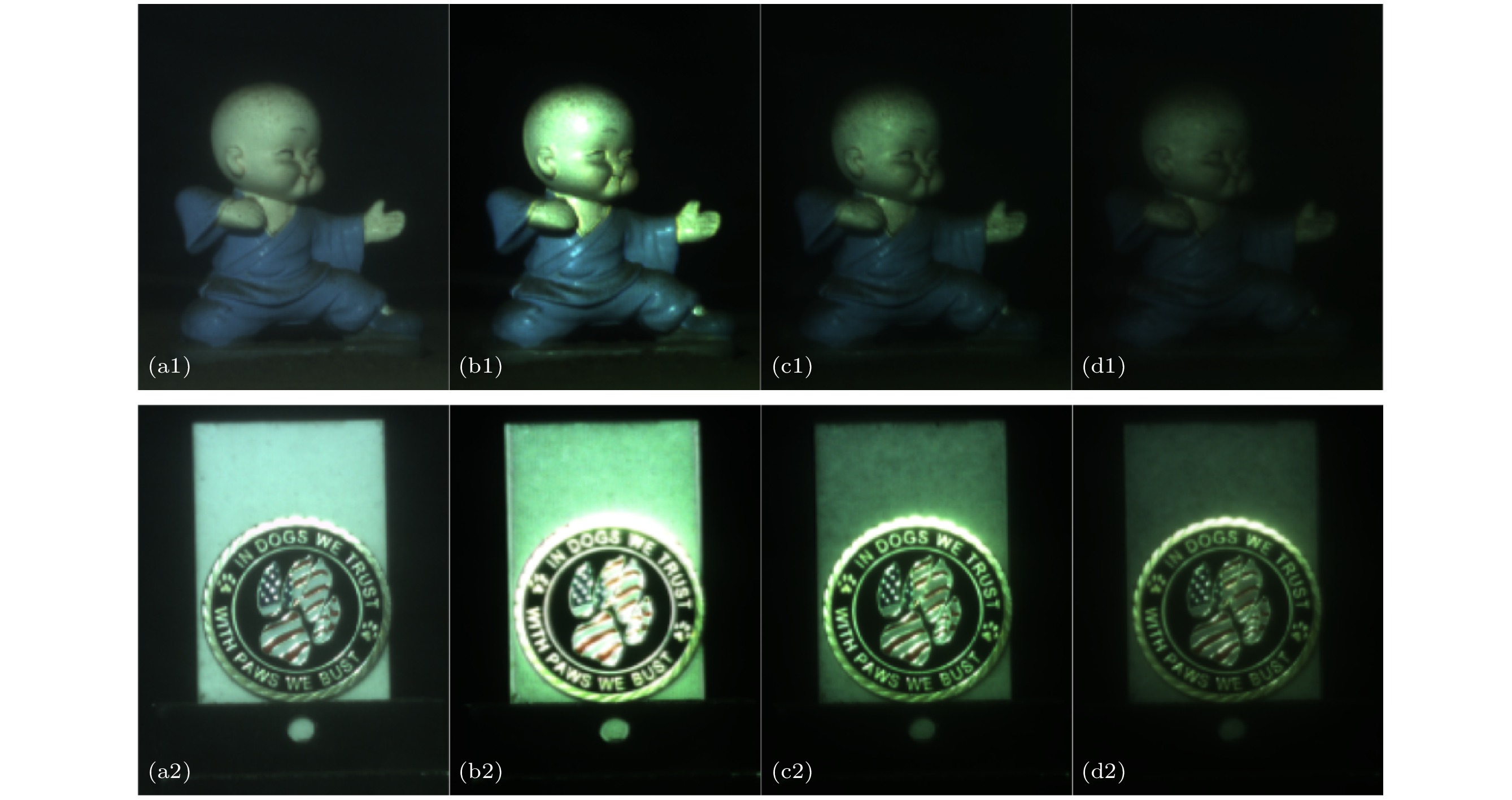
图 4 模拟不同泥沙浓度水下目标图像恢复结果对比, 其中上图为玩偶图像恢复结果; 下图为金属币图像恢复结果 (a1), (a2) 清水图像; (b1), (b2) 泥沙浓度1对应的复原图像; (c1), (c2) 泥沙浓度2对应的复原图像; (d1), (d2) 泥沙浓度3对应的复原图像
Fig. 4. Comparison of simulated underwater target image recovery results with different sediment concentrations. Up panel: Doll image recovery results. Down panel: Metal coin image recovery results. (a1), (a2) Image of clear water; (b1), (b2) the restoration image corresponding to sediment concentration 1; (c1), (c2) the restoration image corresponding to sediment concentration 2; (d1), (d2) the restoration image corresponding to sediment concentration 3.
表 1 实验1结果定量比较
Table 1. Quantitative comparison of experiment 1 results.
目标 PSNR SSIM 拟合法参数估计
重建结果参考视角
恢复结果多视角融合
重建结果拟合法参数估计
重建结果参考视角
恢复结果多视角融合
重建结果玩偶 21.4314 22.5242 25.8240 0.7330 0.8359 0.8885 金属币 23.0696 23.9585 24.5581 0.7232 0.8325 0.8796  下载: 导出CSV
下载: 导出CSV
表 2 实验2结果定量比较
Table 2. Quantitative comparison of experiment 2 results.
目标 PSNR SSIM 浓度1 浓度2 浓度3 浓度4 浓度1 浓度2 浓度3 浓度4 玩偶 25.7283 25.1960 24.4806 23.4975 0.8491 0.8395 0.8261 0.8175 金属币 25.0172 23.8439 22.7466 21.9243 0.8380 0.8220 0.8172 0.8041
下载: 导出CSV
表 3 实验3结果定量比较
Table 3. Quantitative comparison of experiment 3 results.
目标 PSNR SSIM 泥沙浓度1 泥沙浓度2 泥沙浓度3 泥沙浓度1 泥沙浓度2 泥沙浓度3 玩偶 24.7755 23.3930 21.5748 0.7945 0.7303 0.6863 金属币 23.9531 22.6072 20.4858 0.7610 0.7030 0.6184
下载: 导出CSV
-
[1] 胡浩丰, 李校博, 刘铁根 2019 红外与激光工程 48 603006
Google Scholar
Hu H F, Li X B, Liu T G 2019 Infrared Laser Eng. 48 603006
Google Scholar
[2] 黄有为, 金伟其, 丁琨, 李海兰, 曹峰梅, 王霞 2009 红外与激光工程 38 669
Google Scholar
Huang Y W, Jin W Q, Ding K, Li H L, Cao F M, Wang X 2009 Infrared Laser Eng. 38 669
Google Scholar
[3] Emberton S, Chittka L, Cavallaro A 2018 Comput. Vis. Image Und. 168 145
Google Scholar
[4] 韩平丽, 刘飞, 张广, 陶禹, 邵晓鹏 2018 67 054202
Google Scholar
Han P L, Liu F, Zhang G, Tao Y, Shao X P 2018 Acta Phys. Sin. 67 054202
Google Scholar
[5] Li X, Hu H, Zhao L, Wang H, Yu Y, Wu L, Liu T G 2018 Sci. Rep. 8 12430
Google Scholar
[6] Lu H, Li Y, Nakashima S, Kim H, Serikawa S 2017 IEEE Access 5 670
Google Scholar
[7] 李黎, 王惠刚, 刘星 2017 光学学报 37 176
Google Scholar
Li L, Wang H G, Liu X 2017 Acta Optica Sin. 37 176
Google Scholar
[8] Zhang W F, Liang J, Ren L, Ju H J, Qu E S, Bai Z F, Tang Y, Wu Z X 2017 Appl. Optics 56 942
Google Scholar
[9] Mortazavi H, Oakley J P, Barkat B 2013 Meas. Sci. Technol. 24 074025
Google Scholar
[10] Skinner K A, Johnson-Roberson M 2017 IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW) Honolulu, USA, July 21−26, 2017 p1775
[11] Qu Y, Zou Z 2017 Opt. Express 25 25004
Google Scholar
[12] Schechner Y Y, Karpel N 2005 IEEE J. Oceanic Eng. 30 570
Google Scholar
[13] Hu H F, Zhao L, Li X B, Wang H, Liu T G 2018 IEEE Photonics J. 10 6900309
Google Scholar
[14] 周雯, 曹文熙, 李彩 2008 热带海洋学报 27 22
Google Scholar
Zou W, Cao W X, Li C 2008 Journal of Tropical Oceanography 27 22
Google Scholar
[15] Chami M, Marken E, Stamnes J J, Khomenko G, Korotaev G 2006 J. Geophys Res. 111 C05013
Google Scholar
[16] Zhou W, Wang G F, Sun Z H, Cao W X, Xu Z T, Hu S B, Zhao J 2012 Opt. Express 20 11189
Google Scholar
[17] Tan H, Oishi T, Tanaka A, Doerffer R 2015 Appl. Optics 54 7718
Google Scholar
[18] Tan H, Doerffer R, Oishi T and Tanaka A 2013 Opt. Express 21 18697
Google Scholar
[19] Joshi N, Avidan S, Matusik W, Kriegman D 2007 IEEE 11 th International Conference on Computer Vision (ICCV) Rio De Janeiro, Brazil, October 14−20 2007 p1
[20] 聂云峰, 相里斌, 周志良 2011 中国科学院大学学报 28 563
Nie Y F, Xiang L B, Zhou Z L 2011 Journal of Graduate University of Chinese Academy of Sciences 28 563
[21] Takahashi K, Naemura T 2006 Signal Process-Image. 21 519
Google Scholar
[22] Vaish V, Levoy M, Szeliski R, Zitnick C L, Kang S B 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR) New York, USA, June 17−22 2006 p2331


 下载:
下载:



计量
- 文章访问数: 9062
- PDF下载量: 187
- 被引次数: 0
