










-
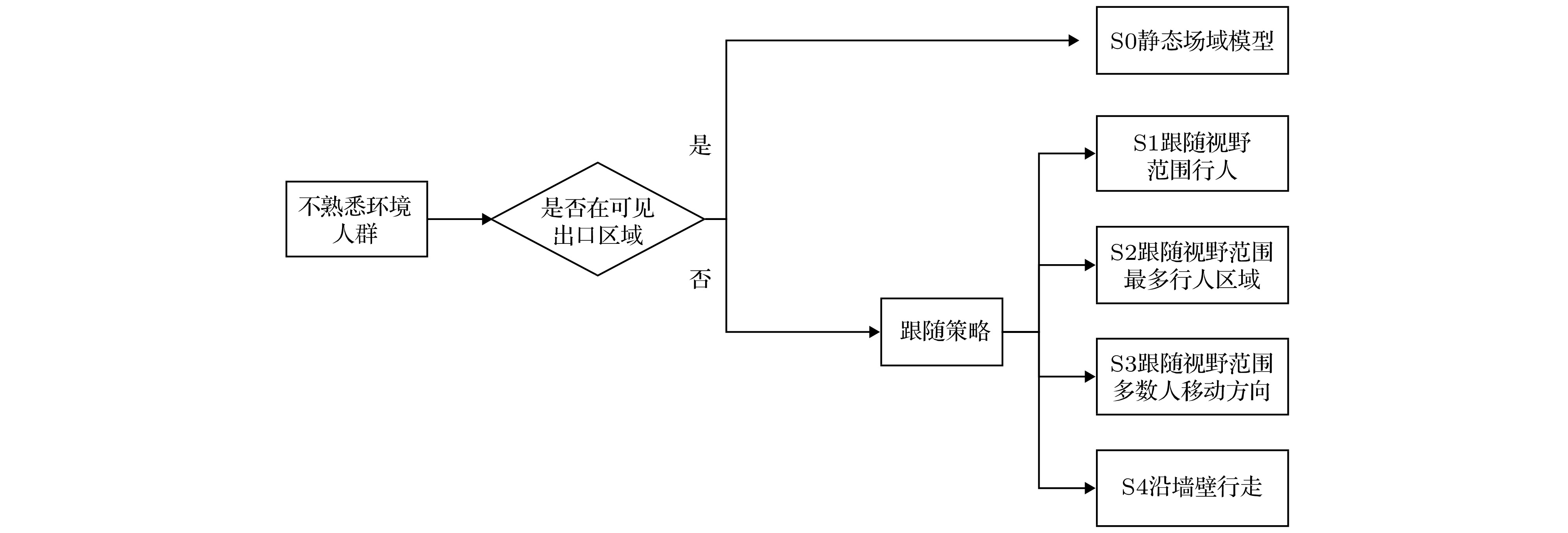
研究了行人在能见度受限情况下的疏散行为, 考虑行人对环境的熟悉程度, 将行人分为熟悉环境人群和不熟悉环境人群. 对于房间内熟悉环境的行人, 改进势函数元胞自动机模型来模拟其疏散行为. 对于不熟悉环境人群, 分析其在视野范围内的跟随行为, 并制定了不同跟随行为策略, 来研究其跟随行为特性. 仿真模拟了房间内熟悉环境人群的人数占比、房间内的视野半径大小以及行人密度等参数, 研究其对行人疏散的影响, 比较不熟悉环境人群采取的跟随策略的优劣. 发现疏散时间的大小与房间内视野半径的大小和房间内熟悉环境者密度的大小有关. 其次, 跟随策略的有效性与视野半径的大小和熟悉环境者密度有关. 而且在单一策略环境下, 有着同样的规律. 这些发现能对大型公共场所如超市、体育馆的应急疏散情况提供一些启示, 有助于在视野受限情况下制定一些有效的指导策略.In order to investigate the following behaviors of pedestrians under limited visibility, pedestrian evacuation is simulated by an improved cellular automata model. Considering the familiarity of pedestrians with the environment, pedestrians are divided into two types: Informed type and uninformed type. For the informed pedestrians, an extended cost potential field cellular automata model is proposed. For the uninformed pedestrians, some following behavior strategies are suggested to study their evacuation behaviors. These following behaviors include following a pedestrian in the visibility (S1), following the most people’s position in the visibility (S2), following the most movement direction in the visibility (S3), and walking along the wall (S4). To investigate the evacuation efficiency of these different following strategies, we compare the performances of different densities of informed pedestrians, different visibility and different pedestrian proportions. As demonstrated by the simulation results, evacuation efficiency and the effectiveness of the following strategies are related to the visibility and density of informed pedestrians. The simulation results show that when the density of informed pedestrians is constant, S4 is more efficient at very poor visibility (R = 1), strategy S3 and S4 are more efficient at poor visibility (1 < R < 7), and the four strategies are equally efficient at good visibility (R > 6). In addition, when the visibility is constant, the density of informed pedestrians is less than 0.5, strategy S3 is the most efficient strategy. When the visibility is constant, the density of informed pedestrians is more than 0.5, the four strategies have a better performance. Moreover, it is noted that the same regular changes also exist in a single strategy environment. These findings can provide some insights into the emergency evacuation of large public places such as supermarkets and stadiums, and help develop effective guidance strategies under limited visibility.
-
Keywords:
- cellular automata /
- visibility /
- familiarity /
- pedestrian evacuation
[1] Helbing D, Molnar P 1995 Phys. Rev. E 51 4282
 Google Scholar
Google Scholar
[2] Helbing D, Farkas I J, Vicsek T 2000 Nature 407 487
Google Scholar
[3] Helbing D, Farkas I J, Vicsek T 2000 Phys. Rev. Lett. 84 1240
Google Scholar
[4] Helbing D, Isobe M, Nagatani T, Takimoto K 2003 Phys. Rev. E 67 067101
Google Scholar
[5] Parisi D, Dorso C 2007 Physica A 385 343
Google Scholar
[6] Muramatsu M, Irie T, Nagatani T 1999 Physica A 267 487
Google Scholar
[7] Tajima Y, Nagatani T 2001 Physica A 292 545
Google Scholar
[8] Nagai R, Fukamachi M, Nagatani T 2006 Physica A 367 449
Google Scholar
[9] Blue V J, Adler J L 2001 Transl. Res. B 35 293
Google Scholar
[10] Tajima Y, Takimoto K, Nagatani T 2002 Physica A 313 709
Google Scholar
[11] Blue V, Embrechts M, Adler J 1997 IEEE International Conference on Systems, Man, and Cybernetics. Computational Cybernetics and Simulation Orlando, USA, October 12−15, 1997 p2320
[12] Burstedde C, Klauck K, Schadschneider A, Zittartzet J 2001 Physica A 295 507
Google Scholar
[13] 周金旺, 邝华, 刘慕仁, 孔令江 2009 58 3001
Google Scholar
Zhou J W, Kuang H, Liu M R, Kong L J 2009 Acta Phys. Sin. 58 3001
Google Scholar
[14] 永贵, 黄海军, 许岩 2013 62 010506
Google Scholar
Yong G, Huang H J, Xu Y 2013 Acta Phys. Sin. 62 010506
Google Scholar
[15] 岳昊, 邵春福, 姚智胜 2009 58 4523
Google Scholar
Yue H, Shao C F, Yao Z S 2009 Acta Phys. Sin. 58 4523
Google Scholar
[16] Zhang P, Jian X X, Wong S, Choi K 2012 Phys. Rev. E 85 021119
Google Scholar
[17] Jian X X, Wong S, Zhang P, Choi K, Li H, Zhang X 2014 Transl. Res. C 42 200
Google Scholar
[18] Hou L, Liu J G, Pan X, Wang B H 2014 Physica A 400 93
Google Scholar
[19] Ma Y, Yuen R K K, Lee E W M 2016 Physica A 450 333
Google Scholar
[20] Ma Y, Lee E W M, Shi M 2017 Phys. Lett. A 381 1837
Google Scholar
[21] Guo R Y, Huang H J, Wong S C 2012 Transl. Res. B 46 669
Google Scholar
[22] Frank G A, Dorso C O 2015 Int. J. Mod. Phys. C 26 1550005
Google Scholar
[23] Wang P, Cao S 2019 Phys. Lett. A 383 825
Google Scholar
[24] Li X, Guo F, Kuang H, Geng Z, Fan Y 2019 Physica A 515 47
Google Scholar
[25] Li D, Han B 2015 Saf. Sci. 80 41
Google Scholar
[26] Zhang Q 2015 Physica A 419 335
Google Scholar
[27] Guo W, Wang X L, Zheng X P 2015 Physica A 432 87
Google Scholar
[28] Yuan W, Tan K H 2009 Curr. Appl. Phys. 9 1014
Google Scholar
[29] Lu L, Chan C Y, Wang J, Wang W 2017 Trans. Res. C 81 317
Google Scholar
[30] Wang X, Zheng X, Cheng Y 2012 Physica A 391 2245
Google Scholar
[31] Fang J, El-Tawil S, Aguirre B 2016 Saf. Sci. 83 40
Google Scholar
-

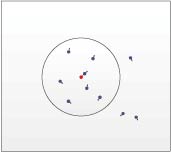
图 2 其他行人对熟悉环境者行人影响图
Fig. 2. Influence of the moving direction for surrounding pedestrian on the desired moving direction for the center pedestrian.

图 7 行人邻域及概率示意图 (a)当前元胞及8个邻居元胞图; (b)当前元胞移动概率图
Fig. 7. Neighboring cell and moving probabilities of pedestrian: (a) An occupied cell and its eight neighboring cells; (b) the corresponding probabilities for occupation in the next update step.

图 9 环境熟悉度与疏散时间的关系图 (a) R = 1 m; (b) R = 2 m; (c) R = 3 m; (d) R = 4 m; (e) R = 5 m
Fig. 9. Relationship between environmental familiarity and evacuation time: (a) R = 1 m; (b) R = 2 m; (c) R = 3 m; (d) R = 4 m; (e) R = 5 m.

图 10 视野半径与疏散时间的关系图 (a) Ks = 0; (b) Ks = 0.1; (c) Ks = 0.2; (d) Ks = 0.3; (e) Ks = 0.4; (f) Ks = 0.5
Fig. 10. Relationship between different visibilities and evacuation time: (a) Ks = 0; (b) Ks = 0.1; (c) Ks = 0.2; (d) Ks = 0.3; (e) Ks = 0.4; (f) Ks = 0.5.
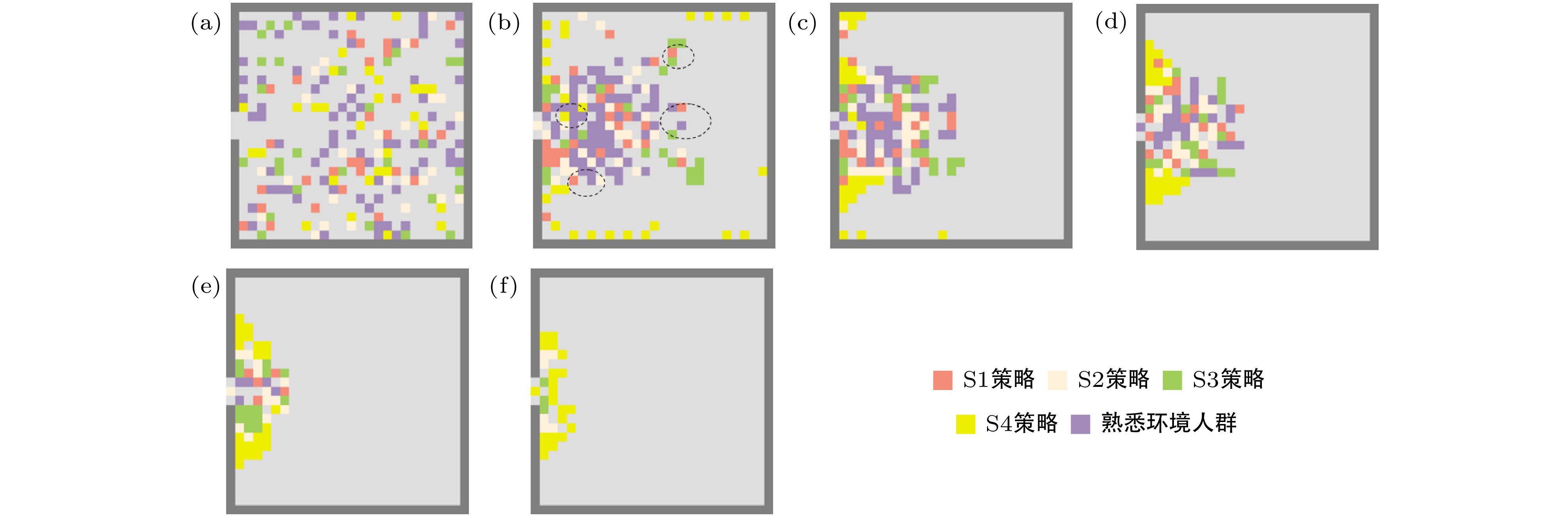
图 11 行人疏散流演化过程(
$\rho = 0.3, Ks = 0.4, R = 3$ ) (a) T = 0; (b) T = 20; (c) T = 40; (d) T = 60; (e) T = 90; (f) T = 110Fig. 11. Evacuation evolution (
$\rho = 0.3, Ks = 0.4, R = 3$ ): (a) T = 0; (b) T = 20; (c) T = 40; (d) T = 60; (e) T = 90; (f) T = 110
图 12 不同密度下各策略视野半径与疏散时间的关系 (a)
$\rho = 0.1$ ; (b)$\rho = 0.2$ ; (c)$\rho = 0.3$ ; (d)$\rho = 0.4$ Fig. 12. Relationship between different visibilities and evacuation time under different density: (a)
$\rho = 0.1$ ; (b)$\rho = 0.2$ ; (c)$\rho = 0.3$ ; (d)$\rho = 0.4$ .
图 13 不同密度下各策略环境熟悉度与疏散时间的关系 (a)
$\rho = 0.1$ ; (b)$\rho = 0.2$ ; (c)$\rho = 0.3$ ; (d)$\rho = 0.4$ Fig. 13. Relationship between environmental familiarity and evacuation time under different density: (a)
$\rho = 0.1$ ; (b)$\rho = 0.2$ ; (c)$\rho = 0.3$ ; (d)$\rho = 0.4$ .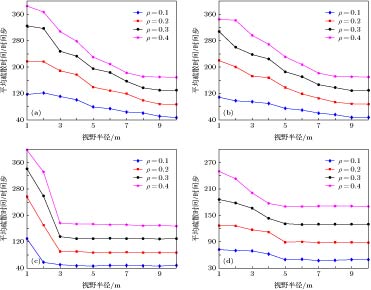
图 14 单一策略下不同密度的视野半径与疏散时间的关系 (a)策略S1; (b)策略S2; (c)策略S3; (d)策略S4
Fig. 14. Relationship between different visibilities and evacuation time at different densities under a single strategy: (a) Strategy S1; (b) strategy S2; (c) strategy S3; (d) strategy S4.

图 15 不同密度下各策略的视野半径与疏散时间的关系 (a)
$\rho = 0.1$ ; (b)$\rho = 0.2$ ; (c)$\rho = 0.3$ ; (d)$\rho = 0.4$ Fig. 15. Relationship of different strategy between different visibilities and evacuation time at different densities: (a)
$\rho = 0.1$ ; (b)$\rho = 0.2$ ; (c)$\rho = 0.3$ ; (d)$\rho = 0.4$ .表 1 参数说明
Table 1. Parameters description.
变量 名称 名称 物理意义 名称 物理意义 L 房间长度 ρ 行人密度 ${\rm{S1}}, {\rm{S2}}, {\rm{S3}}, {\rm{S4}}$ 行人移动策略 W 出口宽度 Ks 熟悉环境者密度 TS1, TS2, TS3, TS4 策略疏散时间 N 行人总人数 R 行人视野半径 T 行人疏散总时间  下载: 导出CSV
下载: 导出CSV
-
[1] Helbing D, Molnar P 1995 Phys. Rev. E 51 4282
Google Scholar
[2] Helbing D, Farkas I J, Vicsek T 2000 Nature 407 487
Google Scholar
[3] Helbing D, Farkas I J, Vicsek T 2000 Phys. Rev. Lett. 84 1240
Google Scholar
[4] Helbing D, Isobe M, Nagatani T, Takimoto K 2003 Phys. Rev. E 67 067101
Google Scholar
[5] Parisi D, Dorso C 2007 Physica A 385 343
Google Scholar
[6] Muramatsu M, Irie T, Nagatani T 1999 Physica A 267 487
Google Scholar
[7] Tajima Y, Nagatani T 2001 Physica A 292 545
Google Scholar
[8] Nagai R, Fukamachi M, Nagatani T 2006 Physica A 367 449
Google Scholar
[9] Blue V J, Adler J L 2001 Transl. Res. B 35 293
Google Scholar
[10] Tajima Y, Takimoto K, Nagatani T 2002 Physica A 313 709
Google Scholar
[11] Blue V, Embrechts M, Adler J 1997 IEEE International Conference on Systems, Man, and Cybernetics. Computational Cybernetics and Simulation Orlando, USA, October 12−15, 1997 p2320
[12] Burstedde C, Klauck K, Schadschneider A, Zittartzet J 2001 Physica A 295 507
Google Scholar
[13] 周金旺, 邝华, 刘慕仁, 孔令江 2009 58 3001
Google Scholar
Zhou J W, Kuang H, Liu M R, Kong L J 2009 Acta Phys. Sin. 58 3001
Google Scholar
[14] 永贵, 黄海军, 许岩 2013 62 010506
Google Scholar
Yong G, Huang H J, Xu Y 2013 Acta Phys. Sin. 62 010506
Google Scholar
[15] 岳昊, 邵春福, 姚智胜 2009 58 4523
Google Scholar
Yue H, Shao C F, Yao Z S 2009 Acta Phys. Sin. 58 4523
Google Scholar
[16] Zhang P, Jian X X, Wong S, Choi K 2012 Phys. Rev. E 85 021119
Google Scholar
[17] Jian X X, Wong S, Zhang P, Choi K, Li H, Zhang X 2014 Transl. Res. C 42 200
Google Scholar
[18] Hou L, Liu J G, Pan X, Wang B H 2014 Physica A 400 93
Google Scholar
[19] Ma Y, Yuen R K K, Lee E W M 2016 Physica A 450 333
Google Scholar
[20] Ma Y, Lee E W M, Shi M 2017 Phys. Lett. A 381 1837
Google Scholar
[21] Guo R Y, Huang H J, Wong S C 2012 Transl. Res. B 46 669
Google Scholar
[22] Frank G A, Dorso C O 2015 Int. J. Mod. Phys. C 26 1550005
Google Scholar
[23] Wang P, Cao S 2019 Phys. Lett. A 383 825
Google Scholar
[24] Li X, Guo F, Kuang H, Geng Z, Fan Y 2019 Physica A 515 47
Google Scholar
[25] Li D, Han B 2015 Saf. Sci. 80 41
Google Scholar
[26] Zhang Q 2015 Physica A 419 335
Google Scholar
[27] Guo W, Wang X L, Zheng X P 2015 Physica A 432 87
Google Scholar
[28] Yuan W, Tan K H 2009 Curr. Appl. Phys. 9 1014
Google Scholar
[29] Lu L, Chan C Y, Wang J, Wang W 2017 Trans. Res. C 81 317
Google Scholar
[30] Wang X, Zheng X, Cheng Y 2012 Physica A 391 2245
Google Scholar
[31] Fang J, El-Tawil S, Aguirre B 2016 Saf. Sci. 83 40
Google Scholar


 下载:
下载:





































计量
- 文章访问数: 11892
- PDF下载量: 164
- 被引次数: 0
