











-
In order to estimate the attitude parameters of space objects under the condition of space-based long-distance observation, a hierarchical solving method based on the time-series spectral signal is proposed to estimate the parameters of surface reflection characteristics and the attitude of the space objects. The first step is to let the space object in three-axis stabilization state be equivalent to a two-facet model. Then multi-level fusion model of bidirectional reflectance distribution function (BRDF) is introduced to describe the spectral reflection characteristics of complex material surfaces. Based on the time-series spectral signal and its model, the product of area and spectral BRDF of the two-facet can be reconstructed. The second step is to set up the two-facet characteristic difference model to select the optimum wavelength based on the maximum of the difference thereby minimizing the influence of coupling characteristics on of the two-facet on attitude estimate. The third step is to construct the time-series spectral signal model under the change of object attitude. The objective function is defined as the error between the model data and the measured data, then the attitude parameter can be estimated using Levenberg-Marquardt algorithm. The simulation result shows that the method is more suitable for the object with cube body, and the error between inversion value and real value will increase as the phase angle and the detector noise increase. When signal-to-noise ratio is greater than or equal to 10, the inversion error is within 2%.
-
Keywords:
- space object /
- attitude estimate /
- time-series spectral signal /
- visible light /
- bidirectional reflectance distribution function
-
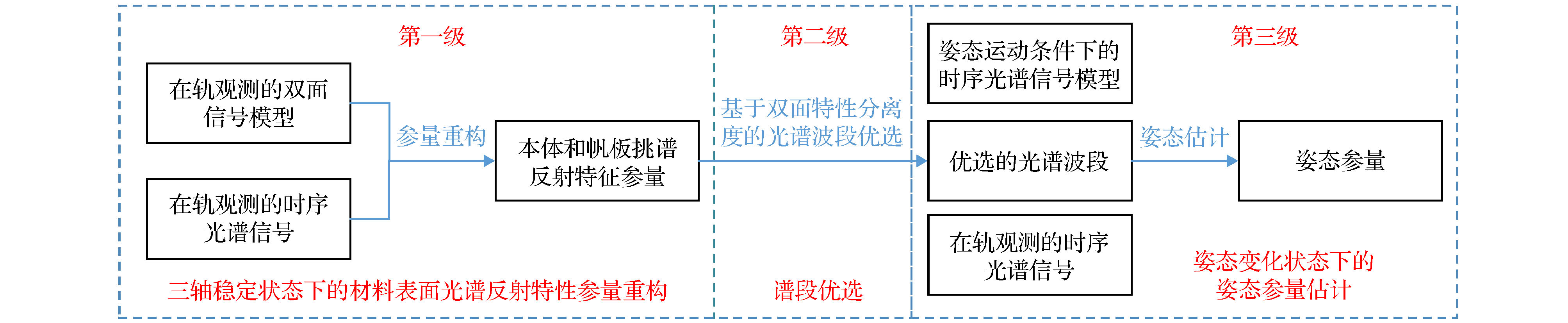
图 1 空间目标姿态参数估计方法的流程图
Figure 1. Flow chart of attitude parameter estimation of space object.
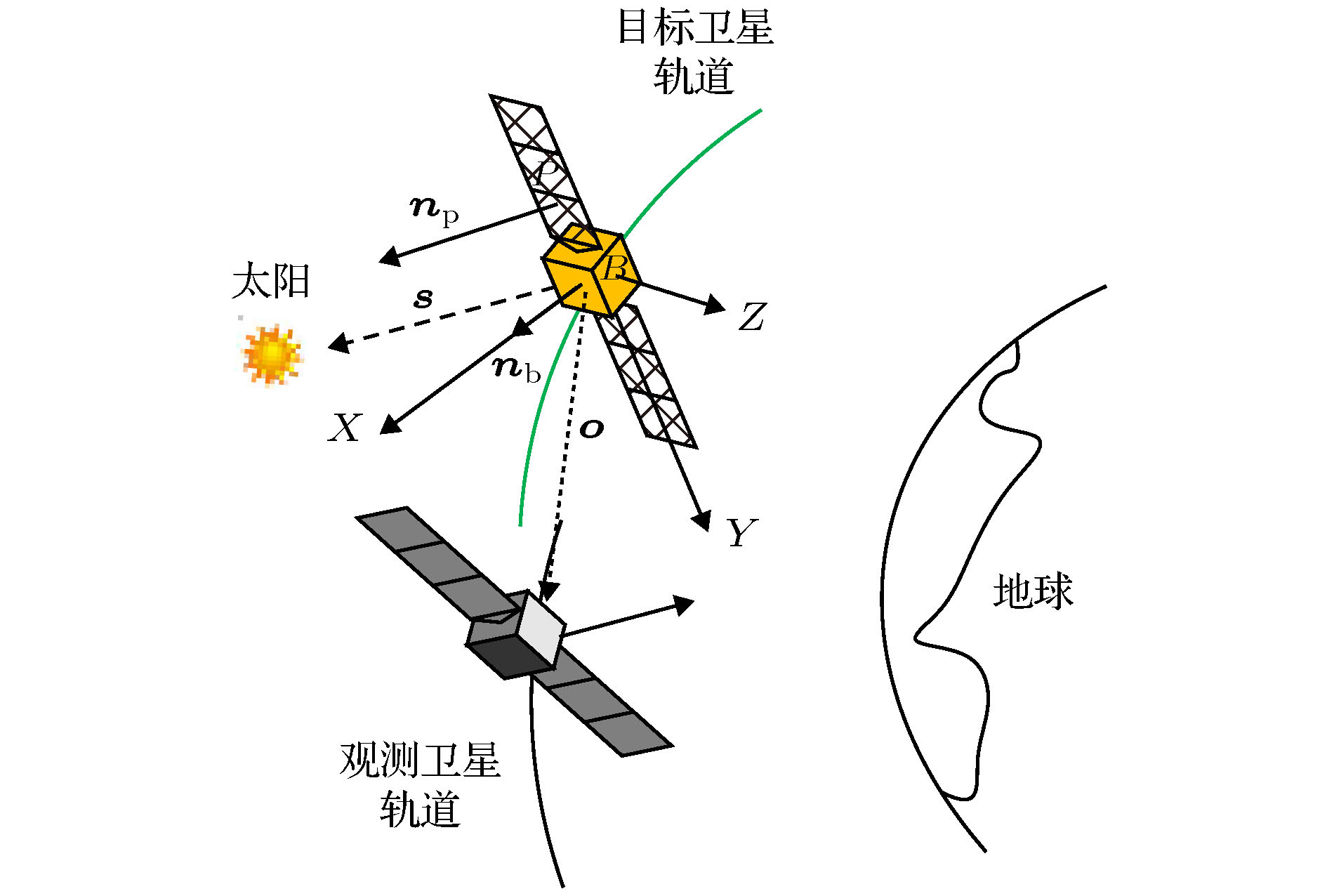
图 2 三轴稳定卫星的在轨观测示意图
Figure 2. Observation diagram of the on-orbit three-axis stabilized satellite.
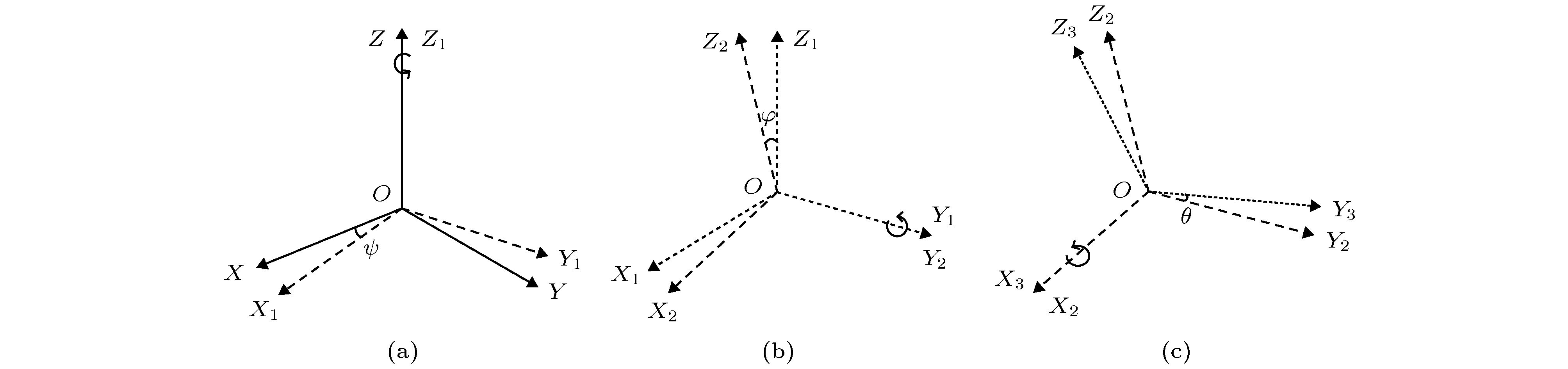
图 3 坐标系旋转变换关系示意图 (a)绕Z轴转动; (b)绕Y轴转动; (c)绕X轴转动
Figure 3. Diagram of coordinate system rotation transformation: (a) Rotate around Z-axis; (b) rotate around Y-axis; (c) rotate around X-axis.

图 4 卫星结构图 (a)面元划分前; (b)面元划分后
Figure 4. Diagram of satellite structure: (a) Before surface division; (b) after surface division.
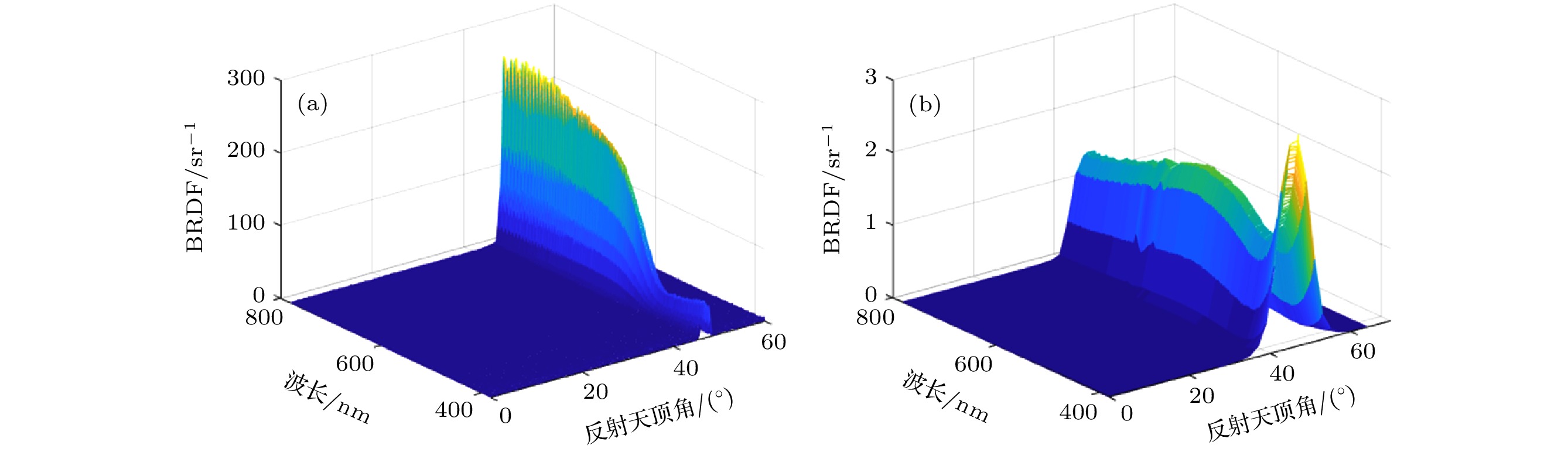
图 5 材料BRDF与波长和反射角的关系 (a) 本体包覆材料BRDF; (b)帆板材料BRDF
Figure 5. Material BRDF changes with wavelength and reflected angle: (a) BRDF of body coating material; (b) BRDF of solar panel
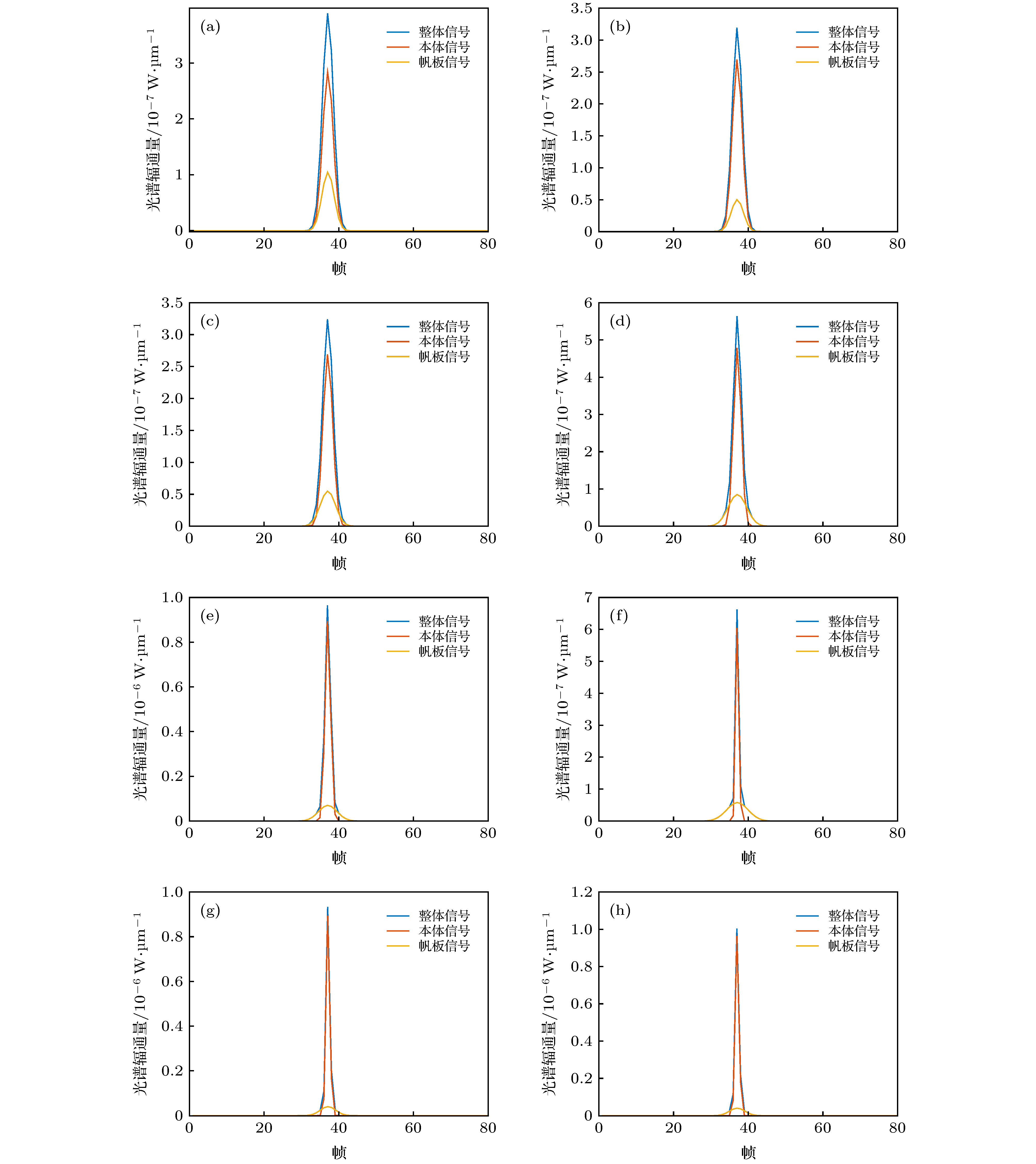
图 6 在不同光谱波段仿真得到的光度信号曲线 (a) 400 nm; (b) 450 nm; (c) 500 nm; (d) 550 nm; (e) 600 nm; (f) 650 nm; (g) 700 nm; (h) 750 nm
Figure 6. Simulation curves of photometric signal at different wavelengths: (a) 400 nm; (b) 450 nm; (c) 500 nm; (d) 550 nm; (e) 600 nm; (f) 650 nm; (g) 700 nm; (h) 750 nm

图 7 650 nm波段下本体及帆板光学特性重构曲线 (a)本体表面光学特性重构曲线; (b)帆板表面光学特性重构曲线
Figure 7. Optical characteristic reconstruction curve of body and solar panel at 650 nm: (a) Reconstruction curve of body; (b) reconstruction curve of solar panel
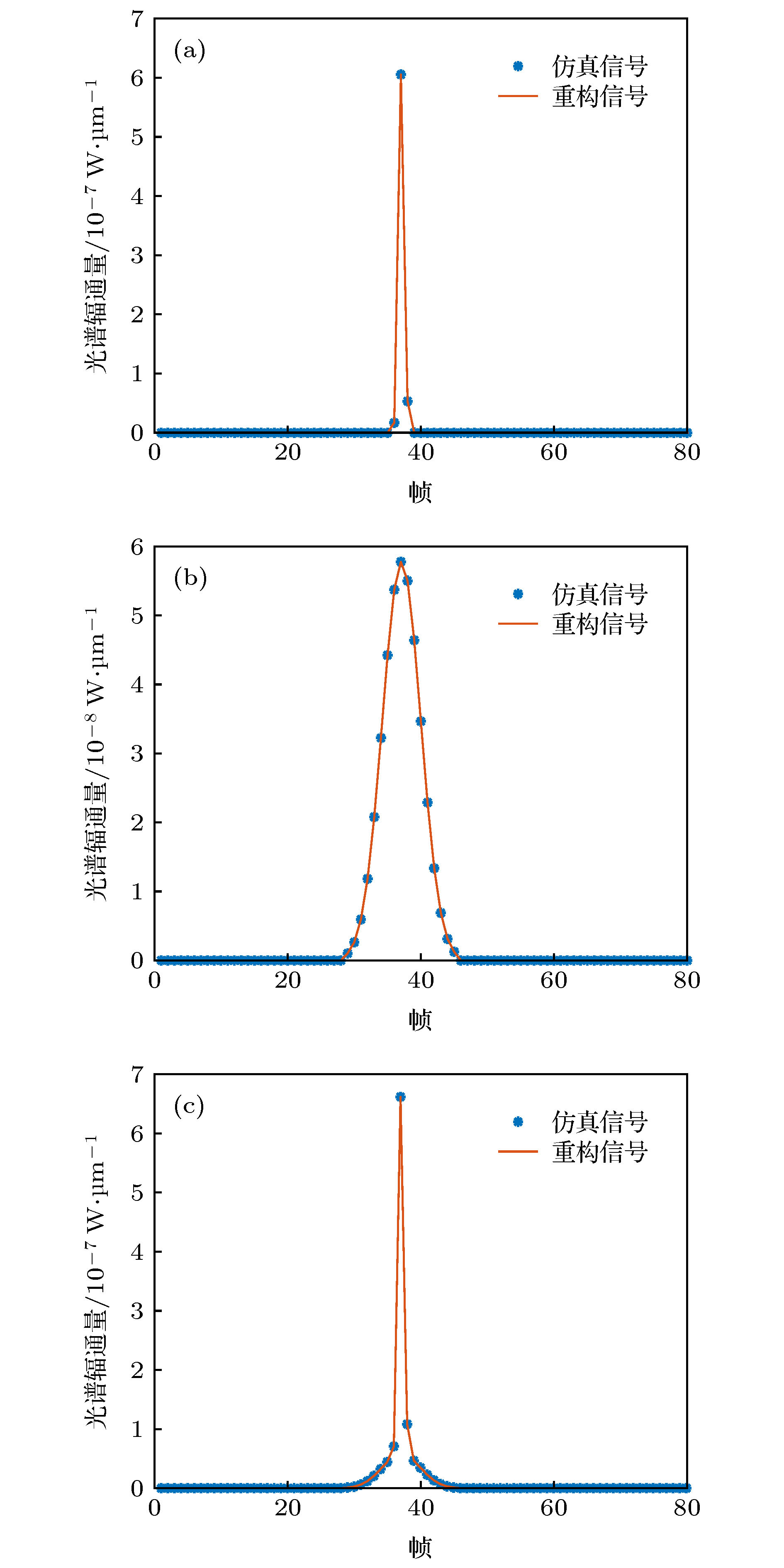
图 8 时序光谱信号重构结果 (a)本体重构结果; (b)帆板重构结果; (c)目标整体重构结果
Figure 8. Reconstruction result of time-series spectral signals: (a) Reconstruction result of body signal; (b) reconstruction result of solar panel signal; (c) reconstruction result of total signal.

图 9 绕Y轴转动得到的时序光谱信号
Figure 9. Time-series spectral signals when rotating around Y-axis.

图 10 绕Z轴转动得到的时序光谱信号
Figure 10. Time-series spectral signals when rotating around Z-axis.
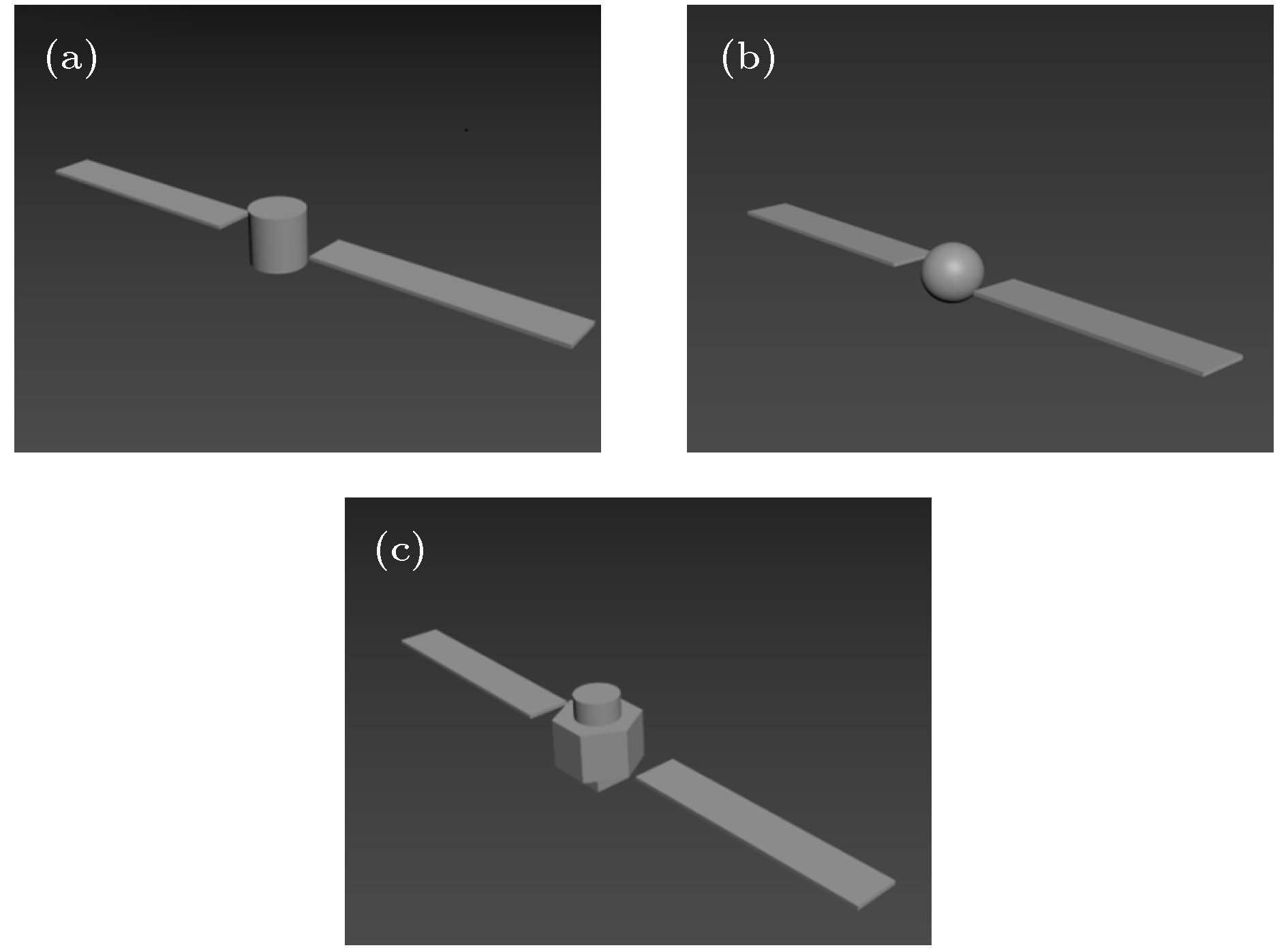
图 11 不同本体形状的目标模型 (a)圆柱体本体; (b)球体本体; (c)六棱柱本体
Figure 11. Object model with different body structure: (a) Cylinder body; (b) sphere body; (c) hexagonal prism body.

图 12 误差随信噪比变化曲线 (a)绕Y轴旋转; (b)绕Z轴旋转
Figure 12. Error curve changes with SNR: (a) Rotate around Y-axis; (b) rotate around Z-axis
表 1 目标卫星与观测卫星的轨道参数
Table 1. Orbit parameter of object satellite and observe satellite.
卫星 半长轴/km 偏心
率/(°)轨道倾
角/(°)近地点
幅角/(°)升交点
赤经/(°)真近点
角/(°)目标卫星 42378.1 0 0 0 181.803 0 观测卫星 42408.0 0 0 0 184.860 359.93  DownLoad: CSV
DownLoad: CSV
表 2 观测星探测系统参数
Table 2. Detection system parameter of observe satellite.
参量 光谱宽度/nm 入瞳直径/m 焦距/m 面阵大小 像元尺寸/m 瞬时视场/rad 数值 10 0.1505 0.8 512 × 512 1.5 × 10–5 1.8750 × 10–5
DownLoad: CSV
表 3 不同光谱波段的双面特性分离度
Table 3. Two-facet characteristics difference at different wavelengths.
光谱波长/nm $\sigma $ 光谱波长/nm $\sigma $ 400 0.1593 600 0.6664 450 0.3850 650 0.8574 500 0.4576 700 0.8284 550 0.5862 750 0.8031
DownLoad: CSV
表 4 650 nm参数重构结果
Table 4. Parameter reconstruction results at 650 nm
序号 本体 帆板 ${A_{\rm{b}}} \cdot {b_j}$ ${\mu _j}$ ${A_{\rm{p}}} \cdot {b_i}$ ${\mu _i}$ 1 0.1722 0.01 0.0003 0.01 2 0.0248 0.02 0.0103 0.02 3 0.0102 0.04 0.0837 0.04 4 0.0517 0.05 0.1046 0.05 5 0.0312 0.07 0.8049 0.07 6 0.0083 0.08 0.1153 0.08 7 0.0137 0.10 0.0489 0.10 8 0.0077 0.20 0.0345 0.20 9 0.0002 0.30 0.0003 0.30 10 0 0.50 0.0103 0.50
DownLoad: CSV
表 5 在不同相位角开始估计得到的姿态角速度
Table 5. Estimate results of attitude angular velocity at different phase angles.
开始
相位角/(°)估计得到的姿态
参数/rad·帧–1相对
误差/%3 [0.0125 –0.00182 0.2567] 1.43 5 [–1.35 × 10–4 0.0176 0.2489] 1.76 10 [–0.0163 –0.0034 0.2567] 1.79 15 [–0.0125 0.0223 0.2458] 2.59 20 [–0.0233 –0.0028 0.2742] 3.37 25 [–0.0132 0.0321 0.2533] 3.49 30 [0.0713 –0.0019 0.3057] 9.05 35 [–0.0679 0.1301 –0.1986] 47.25 40 无解 —
DownLoad: CSV
表 6 不同模型重构曲线误差
Table 6. Errors of reconstruction curves with different models.
模型 整体信号 本体信号 帆板信号 球体 41.68% 61.24% 26.77% 圆柱体 29.77% 46.73% 23.82% 六棱柱 3.56% 15.09% 1.21%
DownLoad: CSV
表 7 不同信噪比下的姿态估计结果
Table 7. Attitude estimate results with different SNR.
信噪比 绕Y轴旋转 绕Z轴旋转 SNR = 1 [8.3448 × 10–7 0.2437 0.0081006] [0.069 0.074087 0.21274] SNR = 3 [4.5801 × 10–7 0.24959 0.0072132] [0.0853 0.003516 0.27007] SNR = 5 [1.9843 × 10–8 0.25191 0.0072818] [0.073 1.1668 × 10–8 0.26576] SNR = 10 [1.2073 × 10–10 0.24933 0.0057039] [0.013255 2.0514 × 10–8 0.25114] SNR = 20 [7.8452 × 10–7 0.25027 0.0059434] [0.007916 4.4372 × 10–6 0.25177] SNR = 50 [8.8736 × 10–8 0.24997 0.0047093] [0.009675 2.0484 × 10–8 0.25056]
DownLoad: CSV
-



 DownLoad:
DownLoad:











Catalog
Metrics
- Abstract views: 7072
- PDF Downloads: 86
- Cited By: 0
