










-
目前基于激光振镜的结构光三维测量技术已经在焊装车间机器人抓取、搬运、上下料等工业场景中得到广泛应用. 然而, 在实际测量场景中存在凹陷、重叠、遮挡等复杂测量结构, 光在微面间易形成多重反射现象, 造成微面区域内的强度信息混叠, 最终导致该测量区域点云缺失. 为解决复杂结构区域测量过程中的点云缺失问题, 本文提出一种以激光振镜作为关键投射模组的双目点云传感器, 在不增加硬件的条件下实现两种不同模式的图像投射, 其中本文所提出的抗多重反射投图模式, 通过调控关键器件之间的时序配合关系, 完成了复杂结构位置的测量, 解决了多重反射干扰下的测量点云缺失问题. 最后, 在实际场景下进行多组实验, 验证所提策略的可行性. 结果表明, 在存在多重反射干扰的测量场景下, 本文所提出的抗多重反射投图模式测量黑件点云的完整性达到98.03%, 较常规测量模式提升18.98%, 有效解决了存在多重反射干扰场景内测量点云的缺失问题.The structured light 3D measurement technology based on laser galvanometer has been widely used in industrial scenarios such as robot grasping, handling, and loading/unloading in welding and assembly workshops. However, in actual measurement scenarios, there are complex measurement structures such as depressions, overlaps, and occlusions. Light is prone to multiple reflections between micro-faces, causing intensity information to be mixed within the micro-face area and ultimately resulting in point cloud loss in this measurement area. To address the issue of point cloud loss in complex structure areas in the measurement process and ensure the accuracy of the measurement information provided by vision, a binocular point cloud sensor with a laser galvanometer as the key projection module is proposed in this work. Without adding hardware, it realizes two different image projection modes to deal with complex measurement situations within the scene. Among them, the anti-multiple reflection projection mode proposed in this work, by regulating the timing coordination relationship between key components, completes the measurement of complex structure positions and solves the problem of point cloud loss caused by multiple reflection interference. Finally, multiple experiments are conducted in actual scenarios to verify the feasibility of the proposed strategy. The experimental results show that in measurement scenarios with multiple reflection interference, the integrity of the black part point cloud measured by the anti-multiple reflection projection mode proposed in this work reaches 98.03%, which is 18.98% higher than the traditional measurement mode. It effectively solves the problem of point cloud loss in measurement scenarios with multiple reflection interference. Visual measurements ensure the accuracy and completeness of the information obtained. The six-axis compensation values determined by the robot for each part’s pose state during teaching become more precise. This ensures that the previously taught robot trajectory can be accurately reused for subsequent poses, thereby reducing the time needed for manual robot debugging and enhancing production efficiency.
-
Keywords:
- structured light measurement /
- laser galvanometer /
- multiple reflection interference /
- point cloud reconstruction
[1] Ramadan M, Youssef A, Ayyad A 2024 Sci. Rep. 14 30742
 Google Scholar
Google Scholar
[2] Woodham R 1980 Opt. Eng. 19 191139
Google Scholar
[3] Li B Y, RenW Q, Fu D P, Tao D C, Feng D, Zeng W J, Wang Z Y 2018 IEEE Trans. Image Process. 28 492
Google Scholar
[4] Gao F, Schaaf B C, Strahler H A, Roesch A, Lucht W, Dickinson R 2005 J. Geophys. Res. Atmos. 110 312
Google Scholar
[5] Carsten S, Adrian S, Frank W 2009 VDI Ber. 206 89
[6] Nayar K S, Krishnan G, Grossberg D M 2006 ACM Trans. Graph. 25 935
Google Scholar
[7] O'Toole M, Mather J 2016 IEEE Trans. Pattern Anal. Mach. Intell. 38 298
Google Scholar
[8] 赵慧洁, 李宇曦, 姜宏志, 李旭东 2023 激光与光电子学进展 60 081108
Zhao H J, Li Y X, Jiang H Z, Li X D 2023 Laser Optoelectron. Prog. 60 081108
[9] Zhang T, Lei P, Huang Y, Rong Y M 2025 Measurement 244 116508
Google Scholar
[10] Seo Y B, Joo K N, Ghim Y S, Rhee H G 2021 Meas. Sci. Technol. 32 045201
Google Scholar
[11] 张启灿, 吴周杰 2020 红外与激光工程 49 0303004
Google Scholar
Zhang Q C, Wu Z J 2020 Infrared Laser Eng. 49 0303004
Google Scholar
[12] Tianyu L, Fajie D, Changwen L 2024 Opt. Express 32 457
Google Scholar
[13] Li J, Wang L, Wan Y 2024 Opt. Lasers Eng. 18 108436
Google Scholar
[14] 张芝贤, 程继坤, 武旭娟 2017 微型机与应用 36 80
Google Scholar
Zhang Z X, Cheng J K, Wu X J 2017 Microcomput. Appl. 36 80
Google Scholar
[15] Pattnayak C B, Mohapatra S 2025 Desalination 604 118703
Google Scholar
[16] Jia J X, Xie F, Bao S T 2025 Opt. Fiber Technol. 90 104115
Google Scholar
[17] Shi J W, Li C Y, Cao K, Wang Y C, Zhang X, Zhou J Y, Zhao F P, Yang F, Chen W B 2024 Opt. Express 32 41004
Google Scholar
[18] Liu S, Chen J, Sun M, Zhao L L, Wei X 2020 IEEE Access 8 11754
Google Scholar
[19] Qian J, Dang S P, Zhou X, Dan D, Wang Z J, Zhao T Y, Liang Y S, Yao B L, Lei M 2020 Acta Phys. Sin. 69 128701 (in Chinese) [千佳, 党诗沛, 周兴, 但旦, 汪召军, 赵天宇, 梁言生, 姚保利, 雷铭 2020 69 128701]
Google Scholar
Qian J, Dang S P, Zhou X, Dan D, Wang Z J, Zhao T Y, Liang Y S, Yao B L, Lei M 2020 Acta Phys. Sin. 69 128701 (in Chinese)
Google Scholar
[20] Abdel-Rehim O A, Davidson J L, Marsh L A, O’Toole M D, Peyton A J 2016 IEEE Sens. J. 16 3775
Google Scholar
-
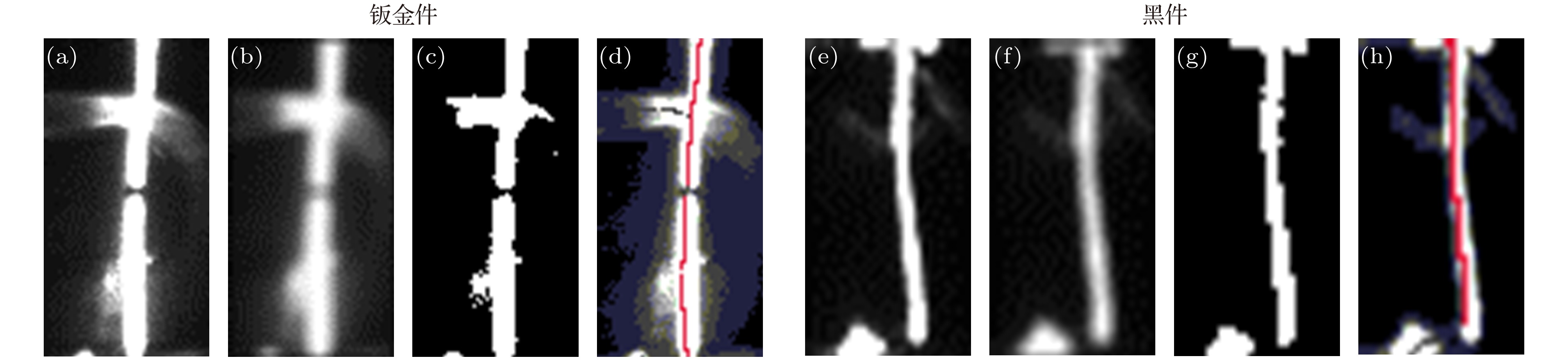
图 5 钣金件、黑件表面处理结果 (a)—(d) 钣金件表面光条处理、前景图和光条中心提取结果; (e)—(h) 黑件表面光条处理、前景图和光条中心提取结果
Fig. 5. Surface treatment results of sheet metal parts and black parts: (a)—(d) Surface stripe treatment, foreground image and stripe center extraction results of sheet metal parts; (e)—(h) surface stripe treatment, foreground image and stripe center extraction results of black parts.
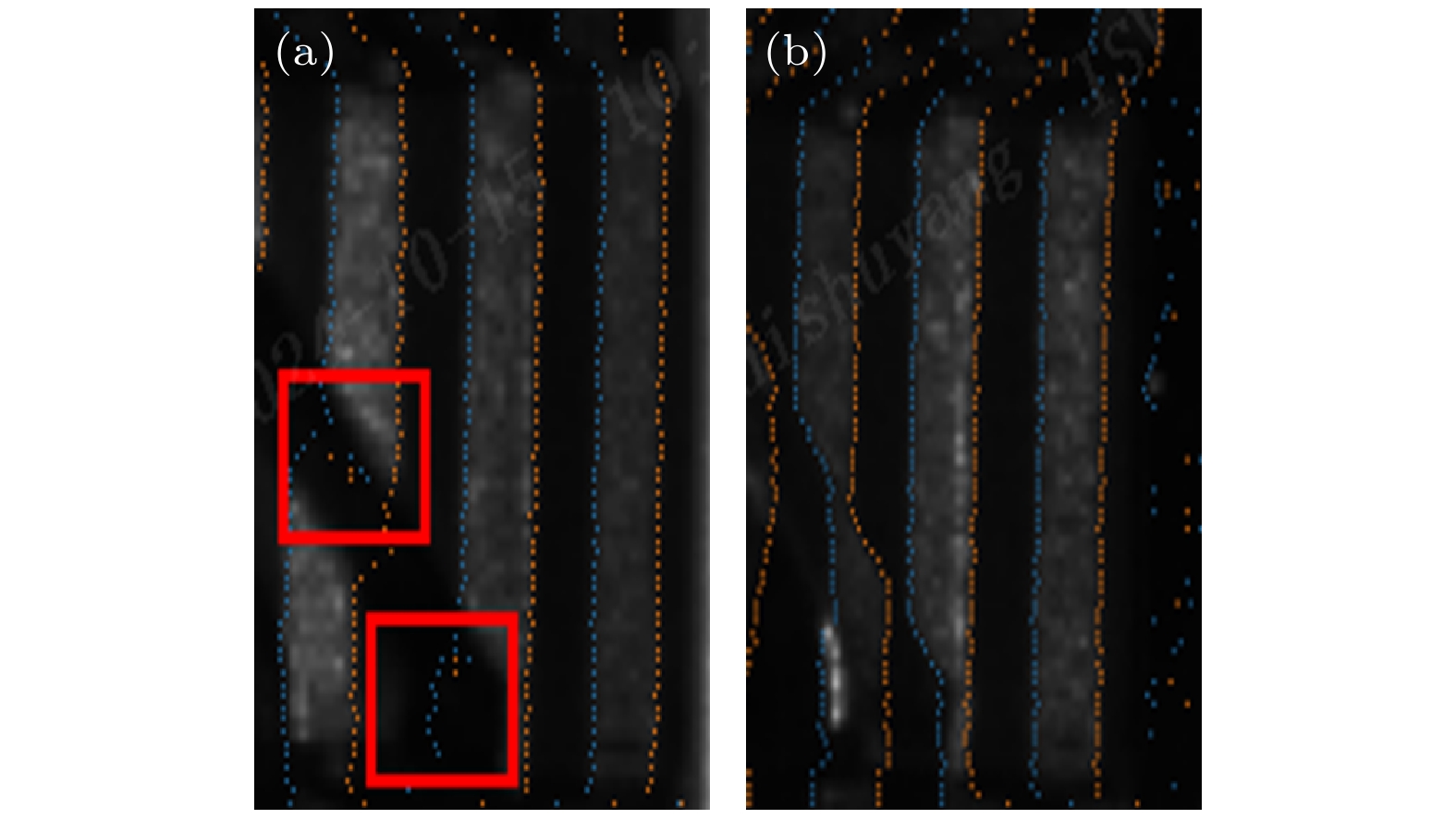
图 11 边缘点提取异常情况 (a) 左相机提取结果; (b) 右相机提取结果
Fig. 11. Edge point extraction abnormal conditions: (a) Extraction result of the left camera; (b) extraction result of the right camera
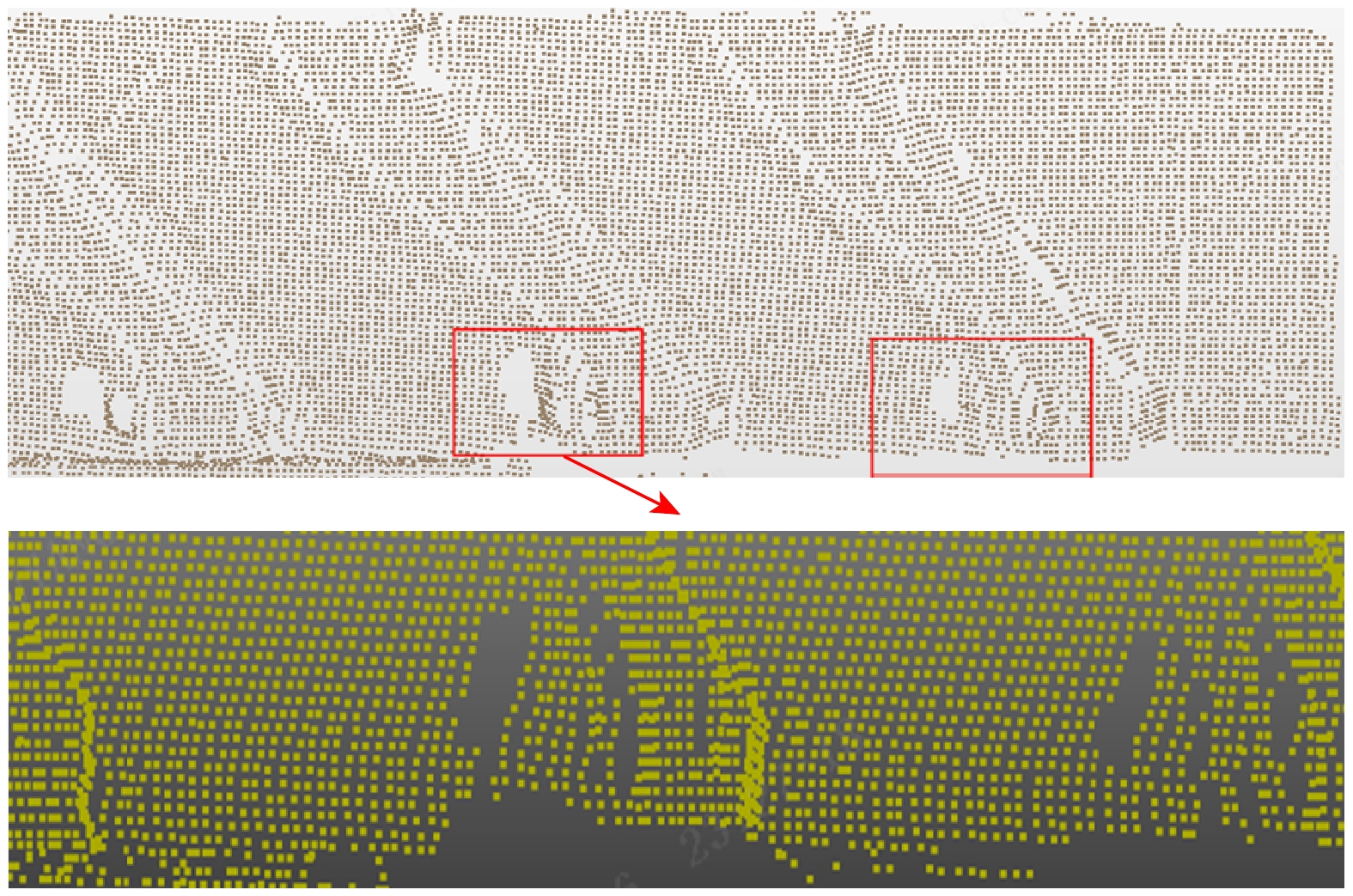
图 12 受多重反射光干扰造成的点云缺失现象
Fig. 12. Phenomenon of point cloud loss caused by interference from multiple reflected lights.
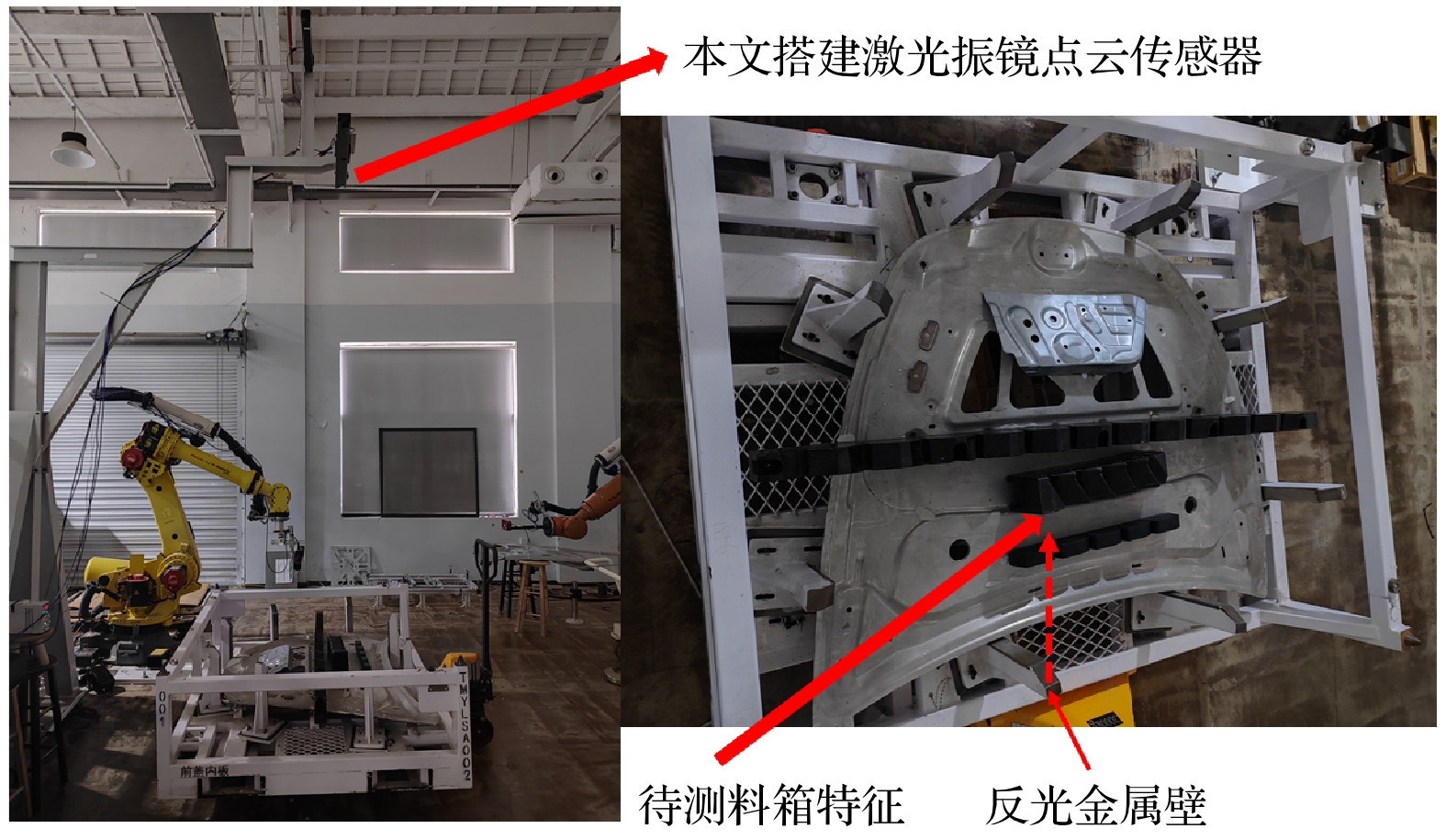
图 14 真实测量场景及待测件摆放情况
Fig. 14. Actual measurement scene and the placement of the object to be measured.
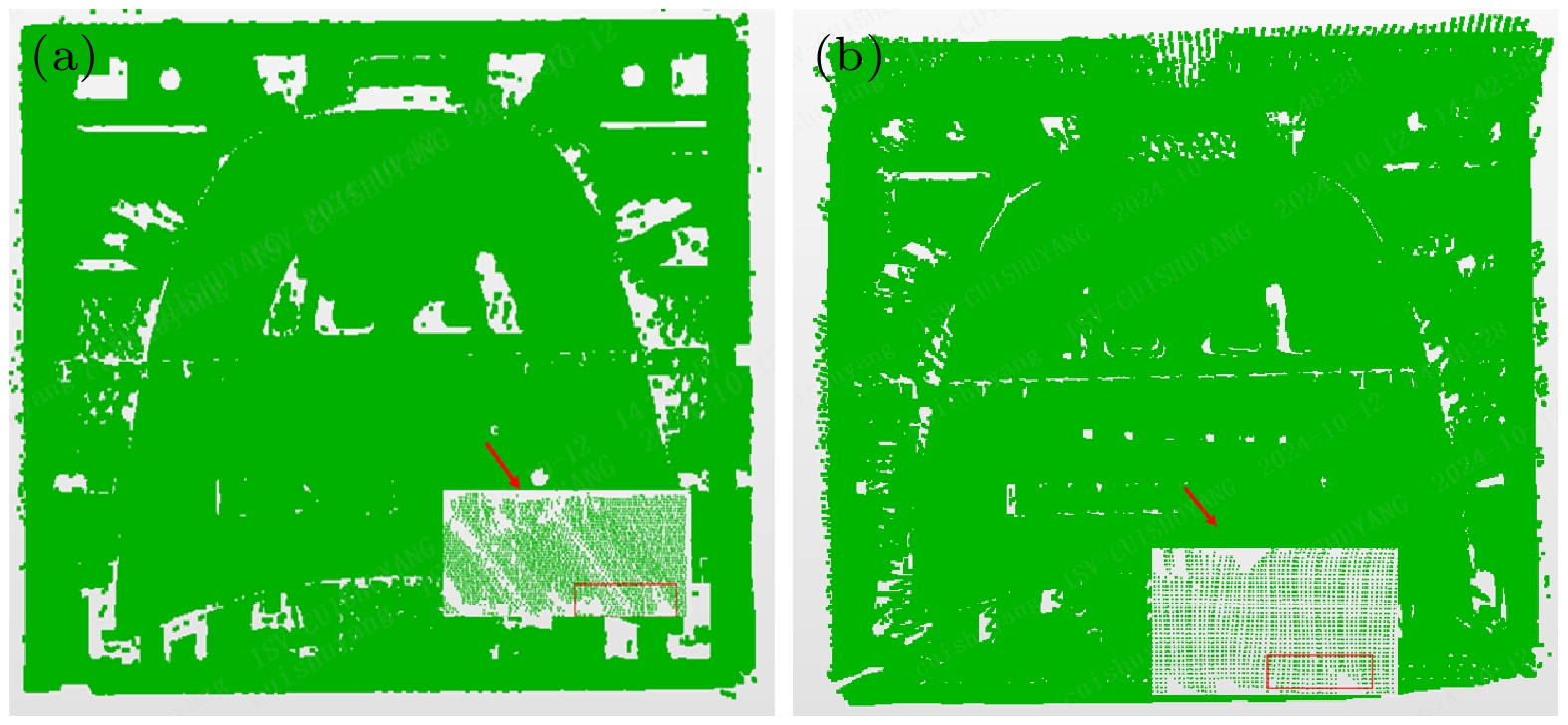
图 15 两种策略重建特征点云效果对比 (a) 常规策略; (b) 抗多重反射策略
Fig. 15. Comparison of the effects of two strategies for reconstructing feature point clouds: (a) Conventional strategy; (b) anti-multiple reflection strategy
表 1 标定结果
Table 1. Calibration results
左相机 右相机 相机内参 $ \left(\begin{array}{ccc}1685.17&0&1022.08\\0&1684.51&764.886\\ 0&0&1\end{array}\right) $ $ \left(\begin{array}{ccc}1689.73&0&1036.15\\ 0&1689.53&763.744\\ 0&0&1\end{array}\right) $ 平均重投影误差 0.03 pixel 0.02 pixel 立体标定结果 $ \left(\begin{array}{cccc}0.93517&0.00656701&0.354139&-832.458\\ -0.00290955&0.999937&-0.0108592&2.80458\\ -0.354188&0.0912484&0.93513&155.423\\ 0&0&0&1\end{array}\right) $  下载: 导出CSV
下载: 导出CSV
表 2 绝对测量精度水平
Table 2. Level of absolute measurement accuracy
传感器 测量方式 球心距/mm 左球直径/mm 右球直径/mm 市面成熟 传感器 — 909.53 101.71 101.66 本文搭建 传感器 常规策略 909.70 101.44 101.70 本文搭建 传感器 抗多重 反射策略 909.46 101.84 100.96
下载: 导出CSV
表 3 重建特征表面点云数量和完整性情况
Table 3. The quantity and integrity of the point cloud of the reconstructed feature surface
实验 组数 常规策略重 建点云数量 完整性/% 抗多重反射策 略重建点云数量 完整性/% 1 2815 79.05 3491 98.03 2 2833 79.56 3516 98.74 3 2798 78.57 3482 97.78
下载: 导出CSV
-
[1] Ramadan M, Youssef A, Ayyad A 2024 Sci. Rep. 14 30742
Google Scholar
[2] Woodham R 1980 Opt. Eng. 19 191139
Google Scholar
[3] Li B Y, RenW Q, Fu D P, Tao D C, Feng D, Zeng W J, Wang Z Y 2018 IEEE Trans. Image Process. 28 492
Google Scholar
[4] Gao F, Schaaf B C, Strahler H A, Roesch A, Lucht W, Dickinson R 2005 J. Geophys. Res. Atmos. 110 312
Google Scholar
[5] Carsten S, Adrian S, Frank W 2009 VDI Ber. 206 89
[6] Nayar K S, Krishnan G, Grossberg D M 2006 ACM Trans. Graph. 25 935
Google Scholar
[7] O'Toole M, Mather J 2016 IEEE Trans. Pattern Anal. Mach. Intell. 38 298
Google Scholar
[8] 赵慧洁, 李宇曦, 姜宏志, 李旭东 2023 激光与光电子学进展 60 081108
Zhao H J, Li Y X, Jiang H Z, Li X D 2023 Laser Optoelectron. Prog. 60 081108
[9] Zhang T, Lei P, Huang Y, Rong Y M 2025 Measurement 244 116508
Google Scholar
[10] Seo Y B, Joo K N, Ghim Y S, Rhee H G 2021 Meas. Sci. Technol. 32 045201
Google Scholar
[11] 张启灿, 吴周杰 2020 红外与激光工程 49 0303004
Google Scholar
Zhang Q C, Wu Z J 2020 Infrared Laser Eng. 49 0303004
Google Scholar
[12] Tianyu L, Fajie D, Changwen L 2024 Opt. Express 32 457
Google Scholar
[13] Li J, Wang L, Wan Y 2024 Opt. Lasers Eng. 18 108436
Google Scholar
[14] 张芝贤, 程继坤, 武旭娟 2017 微型机与应用 36 80
Google Scholar
Zhang Z X, Cheng J K, Wu X J 2017 Microcomput. Appl. 36 80
Google Scholar
[15] Pattnayak C B, Mohapatra S 2025 Desalination 604 118703
Google Scholar
[16] Jia J X, Xie F, Bao S T 2025 Opt. Fiber Technol. 90 104115
Google Scholar
[17] Shi J W, Li C Y, Cao K, Wang Y C, Zhang X, Zhou J Y, Zhao F P, Yang F, Chen W B 2024 Opt. Express 32 41004
Google Scholar
[18] Liu S, Chen J, Sun M, Zhao L L, Wei X 2020 IEEE Access 8 11754
Google Scholar
[19] Qian J, Dang S P, Zhou X, Dan D, Wang Z J, Zhao T Y, Liang Y S, Yao B L, Lei M 2020 Acta Phys. Sin. 69 128701 (in Chinese) [千佳, 党诗沛, 周兴, 但旦, 汪召军, 赵天宇, 梁言生, 姚保利, 雷铭 2020 69 128701]
Google Scholar
Qian J, Dang S P, Zhou X, Dan D, Wang Z J, Zhao T Y, Liang Y S, Yao B L, Lei M 2020 Acta Phys. Sin. 69 128701 (in Chinese)
Google Scholar
[20] Abdel-Rehim O A, Davidson J L, Marsh L A, O’Toole M D, Peyton A J 2016 IEEE Sens. J. 16 3775
Google Scholar


 下载:
下载:














计量
- 文章访问数: 998
- PDF下载量: 26
- 被引次数: 0
