










-
考虑一类等边三角形排布的典型磁力摆, 基于对其全局动力学行为的分析, 研究初值敏感性现象及其机制. 首先, 考虑磁铁位置可以移动, 利用牛顿第二定律建立该磁力摆动力学模型. 进而, 分析不同的磁铁位置所对应的平衡点个数及其稳定性. 在此基础上, 数值模拟初值敏感性现象和不动点吸引域随磁铁位置移动的演变规律. 最后, 通过实验验证该现象. 研究发现, 该类磁力摆普遍存在着多吸引子共存现象, 其初值敏感性可归因于其不动点吸引域的分形, 其中各不动点位置与磁铁中心投影到磁铁所在平面上的位置并不重合, 而是存在微小的偏差; 当摆球位置可投影到3个磁铁对应的等边三角形的形心时, 3个吸引子的吸引域尺寸相当, 呈中心对称状且分形, 因此初值敏感性现象很明显; 移动磁铁位置会直接影响到各吸引域的形态, 即离摆球平衡位置投影点近的磁铁对摆球影响最大, 离该位置最近的吸引子吸引域会明显变大, 而其他吸引子的吸引域则会被侵蚀消减. 本文的研究在磁力摆装置设计方面具有一定的应用价值.Based on the analysis of the global dynamic behavior of a typical magnetic pendulum with equilateral triangular arrangement, the initial sensitivity and its mechanism are studied. To begin with, assuming that the position of the magnet can be moved, the dynamical model of a typical magnetic pendulum is established via Newton’s second law. Furthermore, the number of equilibrium points under different magnet positions and their stability are analyzed. Upon this, the initial sensitivity phenomenon and the evolution of fractal basin of attraction of point attractors under different magnet positions are presented. Finally, the initial sensitivity phenomenon is verified experimentally. It is found that the coexistence of multiple attractors generally appears in this type of magnetic pendulum. The initial sensitivity can be attributed to the fractal basin of attraction of fixed point attractors, in which the positions of the fixed point attractors do not overlap with the projected positions of the center of the magnet on the plane where the magnet is located, but there is a slight deviation. When the position of the swing ball can be projected onto the centroids of three equilateral triangles corresponding to the magnets, the sizes of the three attractors’ attraction domains will be similar, whose boundaries are fractal and centrosymmetric, thus, the initial sensitivity is obvious. It also follows that the position of moving magnet affects the nature of basin of attraction directly, i.e., the magnet which is closest to the projection point of the balance position of the swing ball has a great influence on the swing ball: the domain of attraction of the attractor whose is the closest to the position will increase significantly, while the attractor domains of the other attractors will be eroded obviously. This paper has potential applications in designing the magnetic pendulum systems.
-
Keywords:
- magnetic pendulum /
- initial sensitivity /
- multiple attractors /
- fractal domain of attraction
[1] Siahmakoun A 1997 Am. J. Phys. 65 393
 Google Scholar
Google Scholar
[2] Stefański K, Buszko K, Piecyk K 2010 Chaos 20 033117
Google Scholar
[3] Sathiyadevi K, Karthiga S, Chandrasekar V K 2019 Commun. Nonlinear Sci. Numer. Simul. 72 586
Google Scholar
[4] Souza A P, Savi M A, Iunes F H 2006 J. Sound Vib. 294 585
Google Scholar
[5] Woltering, Markus 2000 Phys. Rev. Lett. 84 630
Google Scholar
[6] Marino F, Marin F 2013 Phys. Rev. E 87 052906
Google Scholar
[7] 杨科利 2016 65 100501
Google Scholar
Yang K L 2016 Acta Phys. Sin. 65 100501
Google Scholar
[8] Zhang S, Zheng J H, Wang X P, Zeng Z G, He S B 2020 Nonlinear Dyn. 102 2821
Google Scholar
[9] Lai Q, Wan Z Q, Paul D K K, Hilaire F 2020 Commun. Nonlinear Sci. Numer. Simul. 89 105341
Google Scholar
[10] Lai Q 2021 Int. J. Bifurcat. Chaos 31 2150013
Google Scholar
[11] Sanz M G 2001 Int. J. Electr. Eng. Educ. 38 26
Google Scholar
[12] Kraftmakher Y 2007 Eur. J. Phys. 28 1007
Google Scholar
[13] Wijata A, Polczyński K, Awrejcewicz J 2020 Mech. Syst. Sig. Process. 150 107229
Google Scholar
[14] Motter A E, Gruiz M, Károlyi G, Tél T 2013 Phys. Rev. Lett. 111 194101
Google Scholar
[15] 谭宁, 徐健学, 康艳梅, 陈永红 2003 52 2989
Google Scholar
Tan N, Xu J X, Kang Y M, Chen Y H 2003 Acta Phys. Sin. 52 2989
Google Scholar
[16] Sinacore J 2010 Phys. Teach. 48 448
Google Scholar
[17] 冯进铃, 徐伟 2011 60 080502
Google Scholar
Feng J L, Xu W 2011 Acta Phys. Sin. 60 080502
Google Scholar
[18] Zhang S, Zeng Y C, Li Z J 2018 Chin. J. Phys. 56 793
Google Scholar
[19] Khomeriki G 2016 Phys. Lett. A 380 2382
Google Scholar
[20] D’Alessio S 2020 Phys. Educ. 55 063002
Google Scholar
[21] Lorenz E N 1963 New York Acad. Sci. 25 409
Google Scholar
[22] Mann B P 2009 J. Sound Vib. 323 864
Google Scholar
[23] James M, Christian C F, Holly A J 2020 Math. Today 70 354020
[24] Peitgen H O, Jürgens H, Saupe D 2004 Chaos and Fractals: New Frontiers of Science (Dordrecht: Springer) pp708–711
[25] 胡海岩 2000 应用非线性动力学 (北京: 航空工业出版社) 第125页
Hu H Y 2000 Applied Nonlinear Dynamics (Beijing: Aviation Industry Press) p125 (in Chinese)
[26] 赵建立, 王文省 2016 高等代数 (北京: 高等教育出版社) 第279−282页
Zhao J L, Wang W S 2016 Higher Algebra (Beijing: Higher Education Press) pp279−282 (in Chinese)
-

图 1 磁力摆 (a) 实物; (b) 改进模型; (c) 简化计算模型
Fig. 1. Magnetic pendulum: (a) Real object; (b) improved model; (c) simplified calculation model.
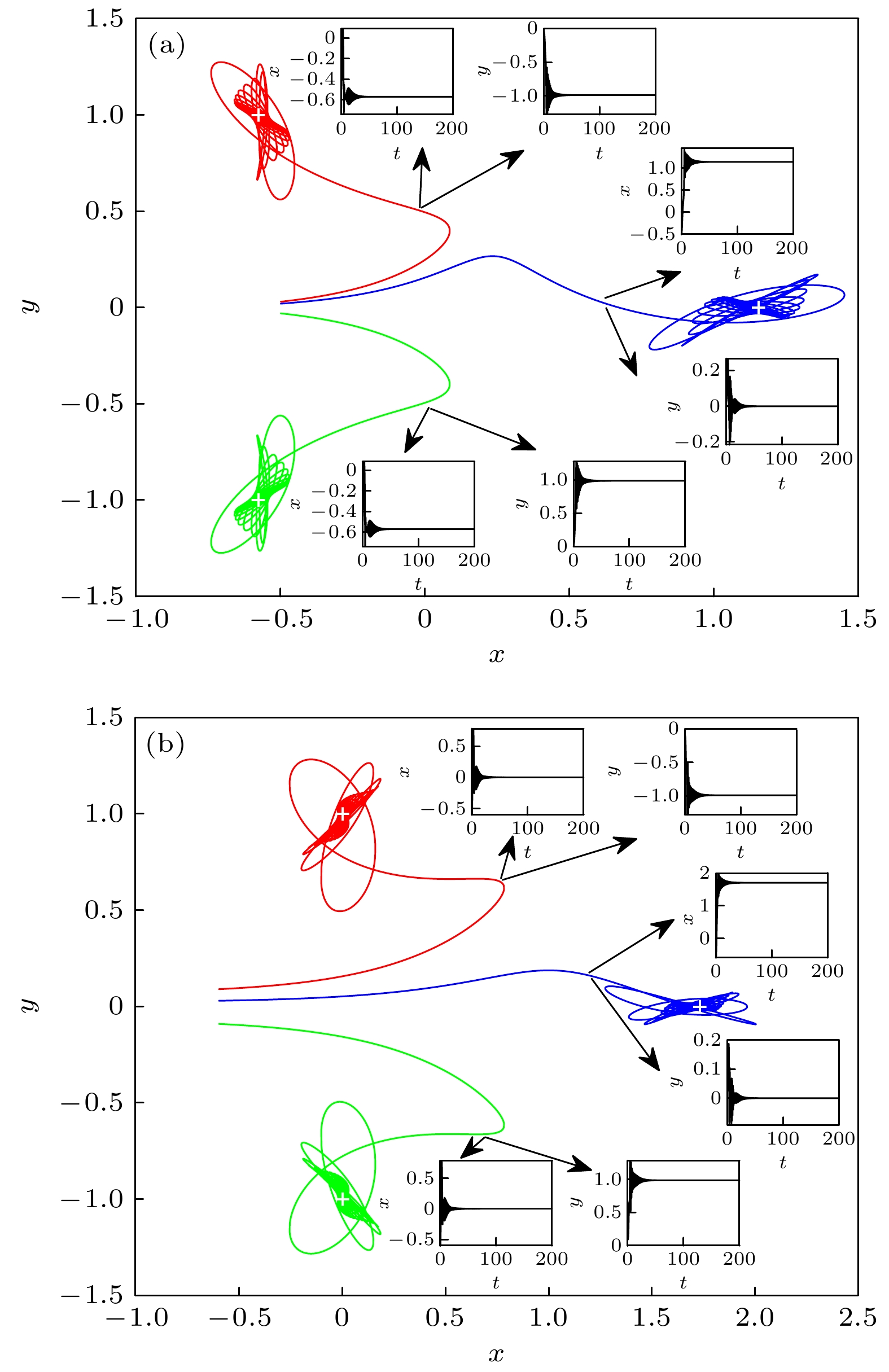
图 3 摆球不同出发位置时运动轨迹和时间历程 (a) 磁铁位置未移动时; (b) 磁铁位置移动时
Fig. 3. Movement trajectory and time history diagram of the swing ball at different starting positions: (a) When the magnet position is not moved; (b) when the magnet position moves.

图 4 磁铁位置未移动时分形吸引域
Fig. 4. Diagram of fractal domain of attraction when magnet position is not moved.

图 5 向左方向平移时分形吸引域随磁铁位置演变 (a)
$ {d_{{L_1}}} = - \sqrt 3 /3 $ ; (b)$ {d_{{L_2}}} = - 2\sqrt 3 /3 $ ; (c)$ {d_{{L_3}}} = - \sqrt 3 $ Fig. 5. Evolution of fractal basin of attraction of the attractors under different translation distances of magnet position to the left: (a)
$ {d_{{L_1}}} = - \sqrt 3 /3 $ ; (b)$ {d_{{L_2}}} = - 2\sqrt 3 /3 $ ; (c)$ {d_{{L_3}}} = - \sqrt 3 $ .
图 6 向右方向平移时分形吸引域随磁铁位置演变 (a)
$ {d_{{R_1}}} = \sqrt 3 /3 $ ; (b)$ {d_{{R_2}}} = 2\sqrt 3 /3 $ ; (c)$ {d_{{R_3}}} = \sqrt 3 $ Fig. 6. Evolution of fractal basin of attraction of the attractors under different translation distances of magnet position to the right: (a)
$ {d_{{R_1}}} = \sqrt 3 /3 $ ; (b)$ {d_{{R_2}}} = 2\sqrt 3 /3 $ ; (c)$ {d_{{R_3}}} = \sqrt 3 $ .
图 7 磁力摆实验装置 (a) 实验整体装置; (b) 电路连接
Fig. 7. An experimental apparatus for a magnetic pendulum: (a) Overall experimental device; (b) circuit connection.

图 8 摆球不同出发位置时光轨运动轨迹 (a) 第1次释放摆球光轨运动轨迹; (b) 第2次释放摆球光轨运动轨迹; (c) 第3次释放摆球光轨运动轨迹
Fig. 8. Trajectory photo of light track in different starting positions of pendulum ball: (a) The trajectory photo of the first release pendulum; (b) the trajectory photo of the second release pendulum; (c) the trajectory photo of the third release pendulum.
表 1 磁铁移动位置
Table 1. Magnet moving position.
序号组别 移动距离 磁铁中心投影到$ xy $平面的位置 0 $ {d_o} = 0 $ $ (x_o^A, \;y_o^A) = (2\sqrt 3 /3, \;0) $, $ (x_o^B, \;y_o^B) = ( - \sqrt 3 /3, \;1) $, $ (x_o^C, \;y_o^C) = ( - \sqrt 3 /3, \; - 1) $ 1 $ {d_{{L_1}}} = - \sqrt 3 /3 $ $ (x_{{L_1}}^A, \;y_o^A) = (\sqrt 3 /3, \;0) $, $ (x_{{L_1}}^B, \;y_o^B) = ( - 2\sqrt 3 /3, \;1) $, $ (x_{{L_1}}^C, \;y_o^C) = ( - 2\sqrt 3 /3, \; - 1) $ 2 $ {d_{{L_2}}} = - 2\sqrt 3 /3 $ $ (x_{{L_2}}^A, \;y_o^A) = (0, \;0) $, $ (x_{{L_2}}^B, \;y_o^B) = ( - \sqrt 3, \;1) $, $ (x_{{L_2}}^C, \;y_o^C) = ( - \sqrt 3, \; - 1) $ 3 $ {d_{{L_3}}} = - \sqrt 3 $ $ (x_{{L_3}}^A, \;y_o^A) = ( - \sqrt 3 /3, \;0) $, $ (x_{{L_3}}^B, \;y_o^B) = ( - 4\sqrt 3 /3, \;1) $, $ (x_{{L_3}}^C, \;y_o^C) = ( - 4\sqrt 3 /3, \; - 1) $ 4 $ {d_{{R_1}}} = \sqrt 3 /3 $ $ (x_{{R_1}}^A, \;y_o^A) = (\sqrt 3, \;0) $, $ (x_{{R_1}}^B, \;y_o^B) = (0, \;1) $, $ (x_{{R_1}}^C, \;y_o^C) = (0, \; - 1) $ 5 $ {d_{{R_2}}} = 2\sqrt 3 /3 $ $ (x_{{R_2}}^A, \;y_o^A) = (4\sqrt 3 /3, \;0) $, $ (x_{{R_2}}^A, \;y_o^B) = (\sqrt 3 /3, \;1) $, $ (x_{{R_2}}^C, \;y_o^C) = (\sqrt 3 /3, \; - 1) $ 6 $ {d_{{R_3}}} = \sqrt 3 $ $ (x_{{R_3}}^A, \;y_o^A) = (5\sqrt 3 /3, \;0) $, $ (x_{{R_3}}^B, \;y_o^B) = (2\sqrt 3 /3, \;1) $, $ (x_{{R_3}}^C, \;y_o^C) = (2\sqrt 3 /3, \; - 1) $  下载: 导出CSV
下载: 导出CSV
表 2 7组不同磁铁位置的平衡点
Table 2. Seven groups of equilibrium points with different magnet positions.
组别序号 移动距离 平衡点位置 0 $ {d_o} = 0 $ $ (\tilde x_o^1, \;\tilde y_o^1) = (1.139, \;0) $, $ (\tilde x_o^2, \;\tilde y_o^2) = ( - 0.570, \;0.986) $, $ (\tilde x_o^3, \;\tilde y_o^3) = ( - 0.570, \; - 0.986) $, $ (\tilde x_o^4, \;\tilde y_o^4) = (0.054, \;0.094) $, $ (\tilde x_o^5, \;\tilde y_o^5) = (0.054, \; - 0.094) $, $ (\tilde x_o^6, \;\tilde y_o^6) = ( - 0.108, \;0) $ 1 $ {d_{{L_1}}} = - \sqrt 3 /3 $ $ (\tilde x_{{L_1}}^1, \;\tilde y_{{L_1}}^1) = (0.566, \;0) $, $ (\tilde x_{{L_1}}^2, \;\tilde y_{{L_1}}^2) = ( - 1.142, \;0.986) $, $ (\tilde x_{{L_1}}^3, \;\tilde y_{{L_1}}^3) = ( - 1.142, \; - 0.986) $, $ (\tilde x_{{L_1}}^4, \;\tilde y_{{L_1}}^4) = ( - 0.521, \;0.343) $, $ (\tilde x_{{L_1}}^5, \;\tilde y_{{L_1}}^5) = ( - 0.521, \; - 0.343) $ 2 $ {d_{{L_2}}} = - 2\sqrt 3 /3 $ $ (\tilde x_{{L_2}}^1, \;\tilde y_{{L_2}}^1) = ( - 0.007, \;0) $, $ (\tilde x_{{L_2}}^2, \;\tilde y_{{L_2}}^2) = ( - 1.715, \;0.986) $, $ (\tilde x_{{L_2}}^3, \;\tilde y_{{L_2}}^3) = ( - 1.715, \; - 0.986) $, $ (\tilde x_{{L_2}}^4, \;\tilde y_{{L_2}}^4) = ( - 1.105, \;0.475) $, $ (\tilde x_{{L_2}}^5, \;\tilde y_{{L_2}}^5) = ( - 1.105, \; - 0.475) $ 3 $ {d_{{L_3}}} = - \sqrt 3 $ $ (\tilde x_{{L_3}}^1, \;\tilde y_{{L_3}}^1) = ( - 0.579, \;0) $, $ (\tilde x_{{L_3}}^2, \;\tilde y_{{L_3}}^2) = ( - 2.288, \;0.986) $, $ (\tilde x_{{L_3}}^3, \;\tilde y_{{L_3}}^3) = ( - 2.288, \; - 0.986) $, $ (\tilde x_{{L_3}}^4, \;\tilde y_{{L_3}}^4) = ( - 1.697, \;0.573) $, $ (\tilde x_{{L_3}}^5, \;\tilde y_{{L_3}}^5) = ( - 1.697, \; - 0.573) $ 4 $ {d_{{R_1}}} = \sqrt 3 /3 $ $ (\tilde x_{{R_1}}^1, \;\tilde y_{{R_1}}^1) = (1.712, \;0) $, $ (\tilde x_{{R_1}}^2, \;\tilde y_{{R_1}}^2) = (0.003, \;0.986) $, $ (\tilde x_{{R_1}}^3, \;\tilde y_{{R_1}}^3) = (0.003, \; - 0.986) $, $ (\tilde x_{{R_1}}^4, \;\tilde y_{{R_1}}^4) = (0.847, \;0) $, $ (\tilde x_{{R_1}}^5, \;\tilde y_{{R_1}}^5) = (0.177, \;0) $ 5 $ {d_{{R_2}}} = 2\sqrt 3 /3 $ $ (\tilde x_{{R_2}}^1, \;\tilde y_{{R_2}}^1) = (2.284, \;0) $, $ (\tilde x_{{R_2}}^2, \;\tilde y_{{R_2}}^2) = (0.576, \;0.986) $, $ (\tilde x_{{R_2}}^3, \;\tilde y_{{R_2}}^3) = (0.576, \; - 0.986) $, $ (\tilde x_{{R_2}}^4, \;\tilde y_{{R_2}}^4) = (1.541, \;0) $, $ (\tilde x_{{R_2}}^5, \;\tilde y_{{R_2}}^5) = (0.595, \;0) $ 6 $ {d_{{R_3}}} = \sqrt 3 $ $ (\tilde x_{{R_3}}^1, \;\tilde y_{{R_3}}^1) = (2.857, \;0) $, $ (\tilde x_{{R_3}}^2, \;\tilde y_{{R_3}}^2) = (1.149, \;0.986) $, $ (\tilde x_{{R_3}}^3, \;\tilde y_{{R_3}}^3) = (1.149, \; - 0.986) $, $ (\tilde x_{{R_3}}^4, \;\tilde y_{{R_3}}^4) = (2.200, \;0) $, $ (\tilde x_{{R_3}}^5, \;\tilde y_{{R_3}}^5) = (1.025, \;0) $
下载: 导出CSV
表 3 磁力摆系统移动磁铁位置时稳定的平衡点判定结果
Table 3. Results of judging the stable equilibrium point when the magnetic pendulum moves the position of the magnet.
序号组别 平衡点位置 平衡点特征值 特征子空间维数 稳定性 0 $ (\tilde x_o^1, \;\tilde y_o^1) $ $\lambda _{1, \;2}^1 = \pm 2.61{\rm{i} }$, $ \lambda _{3, \;4}^1 = 0 $ 4 稳定 $ (\tilde x_o^2, \;\tilde y_o^2) $ $ \lambda _{1, \;2}^2 = \pm 2.38{\rm{i}} $, $ \lambda _{3, \;4}^2 = \pm 1.07{\rm{i}} $ 4 稳定 $ (\tilde x_o^3, \;\tilde y_o^3) $ $ \lambda _{1, \;2}^3 = \pm 2.38{\rm{i}} $, $ \lambda _{3, \;4}^3 = \pm 1.07{\rm{i}} $ 4 稳定 1 $ (\tilde x_{{L_1}}^1, \;\tilde y_{{L_1}}^1) $ $ \lambda _{1, \;2}^1 = \pm 6.28{\rm{i}} $, $ \lambda _{3, \;4}^1 = 0 $ 4 稳定 $ (\tilde x_{{L_1}}^2, \;\tilde y_{{L_1}}^2) $ $ \lambda _{1, \;2}^2 = \pm 1.53{\rm{i}} $, $ \lambda _{3, \;4}^2 = \pm 0.87{\rm{i}} $ 4 稳定 $ (\tilde x_{{L_1}}^3, \;\tilde y_{{L_1}}^3) $ $ \lambda _{1, \;2}^3 = \pm 1.53{\rm{i}} $, $ \lambda _{3, \;4}^3 = \pm 0.87{\rm{i}} $ 4 稳定 2 $ (\tilde x_{{L_2}}^1, \;\tilde y_{{L_2}}^1) $ $ \lambda _{1, \;2}^1 = \pm 0.52{\rm{i}} $, $ \lambda _{3, \;4}^1 = 0 $ 4 稳定 $ (\tilde x_{{L_2}}^2, \;\tilde y_{{L_2}}^2) $ $ \lambda _{1, \;2}^2 = \pm 1.09{\rm{i}} $, $ \lambda _{3, \;4}^2 = \pm 0.49{\rm{i}} $ 4 稳定 $ (\tilde x_{{L_2}}^3, \;\tilde y_{{L_2}}^3) $ $\lambda _{1, \;2}^3 = \pm 1.09{\rm{i} }$, $\lambda _{3, \;4}^3 = \pm 0.49{\rm{i} }$ 4 稳定 3 $ (\tilde x_{{L_3}}^1, \tilde y_{{L_3}}^1) $ $\lambda _{1, \;2}^1 = \pm 6.39{\rm{i} }$, $ \lambda _{3, \;4}^1 = 0 $ 4 稳定 $ (\tilde x_{{L_3}}^2, \tilde y_{{L_3}}^2) $ $\lambda _{1, \;2}^2 = \pm 0.80{\rm{i} }$, $\lambda _{3, \;4}^2 = \pm 0.28{\rm{i} }$ 4 稳定 $ (\tilde x_{{L_3}}^3, \tilde y_{{L_3}}^3) $ $\lambda _{1, \;2}^3 = \pm 0.80{\rm{i} }$, $\lambda _{3, \;4}^3 = \pm 0.28{\rm{i} }$ 4 稳定 4 $ (\tilde x_{{R_1}}^1, \tilde y_{{R_1}}^1) $ $ \lambda _{1, \;2}^1 = \pm 1.47{\rm{i}} $, $ \lambda _{3, \;4}^1 = 0 $ 4 稳定 $ (\tilde x_{{R_1}}^2, \tilde y_{{R_1}}^2) $ $ \lambda _{1, \;2}^2 = \pm 3.18{\rm{i}} $, $ \lambda _{3, \;4}^2 = \pm 0.01{\rm{i}} $ 4 稳定 $ (\tilde x_{{R_1}}^3, \tilde y_{{R_1}}^3) $ $\lambda _{1, \;2}^3 = \pm 3.18{\rm{i} }$, $ \lambda _{3, \;4}^3 = \pm 0.01{\rm{i}} $ 4 稳定 5 $ (\tilde x_{{R_2}}^1, \;\tilde y_{{R_2}}^1) $ $ \lambda _{1, \;2}^1 = \pm 0.96{\rm{i}} $, $ \lambda _{3, \;4}^1 = 0 $ 4 稳定 $ (\tilde x_{{R_2}}^2, \;\tilde y_{{R_2}}^2) $ $ \lambda _{1, \;2}^2 = \pm 2.38{\rm{i}} $, $ \lambda _{3, \;4}^2 = \pm 1.08{\rm{i}} $ 4 稳定 $ (\tilde x_{{R_2}}^3, \;\tilde y_{{R_2}}^3) $ $ \lambda _{1, \;2}^3 = \pm 2.38{\rm{i}} $, $ \lambda _{3, \;4}^3 = \pm 1.08{\rm{i}} $ 4 稳定 6 $ (\tilde x_{{R_3}}^1, \;\tilde y_{{R_3}}^1) $ $ \lambda _{1, \;2}^1 = \pm 0.69{\rm{i}} $, $ \lambda _{3, \;4}^1 = 0 $ 4 稳定 $ (\tilde x_{{R_3}}^2, \;\tilde y_{{R_3}}^2) $ $ \lambda _{1, \;2}^2 = \pm 1.54{\rm{i}} $, $\lambda _{3, \;4}^2 = \pm 0.87{\rm{i} }$ 4 稳定 $ (\tilde x_{{R_3}}^3, \;\tilde y_{{R_3}}^3) $ $ \lambda _{1, \;2}^3 = \pm 1.54{\rm{i}} $, $ \lambda _{3, \;4}^3 = \pm 0.87{\rm{i}} $ 4 稳定
下载: 导出CSV
-
[1] Siahmakoun A 1997 Am. J. Phys. 65 393
Google Scholar
[2] Stefański K, Buszko K, Piecyk K 2010 Chaos 20 033117
Google Scholar
[3] Sathiyadevi K, Karthiga S, Chandrasekar V K 2019 Commun. Nonlinear Sci. Numer. Simul. 72 586
Google Scholar
[4] Souza A P, Savi M A, Iunes F H 2006 J. Sound Vib. 294 585
Google Scholar
[5] Woltering, Markus 2000 Phys. Rev. Lett. 84 630
Google Scholar
[6] Marino F, Marin F 2013 Phys. Rev. E 87 052906
Google Scholar
[7] 杨科利 2016 65 100501
Google Scholar
Yang K L 2016 Acta Phys. Sin. 65 100501
Google Scholar
[8] Zhang S, Zheng J H, Wang X P, Zeng Z G, He S B 2020 Nonlinear Dyn. 102 2821
Google Scholar
[9] Lai Q, Wan Z Q, Paul D K K, Hilaire F 2020 Commun. Nonlinear Sci. Numer. Simul. 89 105341
Google Scholar
[10] Lai Q 2021 Int. J. Bifurcat. Chaos 31 2150013
Google Scholar
[11] Sanz M G 2001 Int. J. Electr. Eng. Educ. 38 26
Google Scholar
[12] Kraftmakher Y 2007 Eur. J. Phys. 28 1007
Google Scholar
[13] Wijata A, Polczyński K, Awrejcewicz J 2020 Mech. Syst. Sig. Process. 150 107229
Google Scholar
[14] Motter A E, Gruiz M, Károlyi G, Tél T 2013 Phys. Rev. Lett. 111 194101
Google Scholar
[15] 谭宁, 徐健学, 康艳梅, 陈永红 2003 52 2989
Google Scholar
Tan N, Xu J X, Kang Y M, Chen Y H 2003 Acta Phys. Sin. 52 2989
Google Scholar
[16] Sinacore J 2010 Phys. Teach. 48 448
Google Scholar
[17] 冯进铃, 徐伟 2011 60 080502
Google Scholar
Feng J L, Xu W 2011 Acta Phys. Sin. 60 080502
Google Scholar
[18] Zhang S, Zeng Y C, Li Z J 2018 Chin. J. Phys. 56 793
Google Scholar
[19] Khomeriki G 2016 Phys. Lett. A 380 2382
Google Scholar
[20] D’Alessio S 2020 Phys. Educ. 55 063002
Google Scholar
[21] Lorenz E N 1963 New York Acad. Sci. 25 409
Google Scholar
[22] Mann B P 2009 J. Sound Vib. 323 864
Google Scholar
[23] James M, Christian C F, Holly A J 2020 Math. Today 70 354020
[24] Peitgen H O, Jürgens H, Saupe D 2004 Chaos and Fractals: New Frontiers of Science (Dordrecht: Springer) pp708–711
[25] 胡海岩 2000 应用非线性动力学 (北京: 航空工业出版社) 第125页
Hu H Y 2000 Applied Nonlinear Dynamics (Beijing: Aviation Industry Press) p125 (in Chinese)
[26] 赵建立, 王文省 2016 高等代数 (北京: 高等教育出版社) 第279−282页
Zhao J L, Wang W S 2016 Higher Algebra (Beijing: Higher Education Press) pp279−282 (in Chinese)


 下载:
下载:



















计量
- 文章访问数: 7883
- PDF下载量: 161
- 被引次数: 0
